XiaoMi-AI文件搜索系统
World File Search System数据字

采用固件集成技术 Rev.3.10 的 RX 系列 WDT 模块
ROM(代码和常量)和 RAM(全局数据)的大小由 2.8 配置概述中所述的构建时配置选项决定。该表列出了当 C 编译器的编译选项设置为其默认值时的参考值,如 2.4 支持的工具链中所述。编译选项的默认值为优化级别:2、优化类型:for size 和数据字节序:little-endian。代码大小因 C 编译器版本和编译选项而异。

DR068 - 数字化接收器 - Teledyne Defense Electronics
一般操作如下所述: • 每次检测到并测量 RF 脉冲时,DR068 都会在 FPDP 上传输脉冲描述符字。• FPDP 通信是单向的,但是,接收器能够通过断言 SUSPEND 信号来暂停 PDW 的传输。• FPDP 数据字是 32 位宽的“帧”,DR068 PDW 长度为 96 位,因此每个 PDW 传输 3 个 32 位帧 • FDPD 时钟速率为 40MHz。• PDW 传输需要 5 个时钟周期,因此在 40MHz 时,TX PDW 需要 125ns。

FLODAC - 纯流体数字计算机 - Gwern.net
被执行,并且除了在条件跳转指令执行期间之外,在每个指令周期结束时加一。在步骤 1 期间,控制计数器操作存储器选择电路,并且在步骤 1 结束时,包含下一条指令的指定存储器字被读入静态寄存器。两个左边的位被解码为操作,并且该信息被发送到功能选择电路,在那里,结合步进计数器和时钟信号,生成所有指令所需的门控脉冲。两个右边的位指定操作数地址,被发送到存储器选择电路,允许读出所需的数据字。所有这些都发生在步骤 1 期间。实际的指令执行在最后三个步骤中的一些或全部期间进行。

C:/Dace Backup/DSN/CRC 论文/final_final_version/Paultisch_CRC_Ultra_dependable.dvi
循环冗余码 (CRC) 如果使用得当,可以成为一种有效且相对便宜的方法来检测通信信道上的数据损坏。但是,有些系统使用 CRC 的方式违反了分析 CRC 有效性时做出的常见假设,导致对系统可靠性的预测过于乐观。CRC 以一定的概率检测错误,这取决于所用特定代码的强度、误码率和正在检查的消息长度等因素。常见的假设还包括被动网络级间、显式数据字、无记忆通道和随机独立符号错误。在本文中,我们确定了一些 CRC 使用示例,这些示例损害了超可靠的系统设计目标,并推荐了通过架构方法而不是错误检测编码方法来提高系统可靠性的替代方法。

AN13566 - i.MX 8 系列上的 ECC
就我们的目的而言,当检测到 ECC 单比特错误时,所提供的数据将被更正并发送给请求者。但是,这些数据不会被写回到内存中。由于 SBR 会不断在整个受保护空间上运行,读取数据和 ECC 并执行检查,因此它最终会遇到错误的数据字。当清理器检测到可更正的错误时,则会安排一个没有有效数据的 RMW 操作。它会读取内存检查、更正数据,并将更正后的数据写回到内存中。这会定期运行,读取之间的时间是可编程的,并覆盖指定的地址范围。当“Scrub_Burst”被编程时,SBR 会自动确保这些“背对背”事务之后有一段较长的等待时间。它会执行“n”个事务并等待“n”个间隔。这很有用,这样 SBR 就不会不断中断系统流量。
TMP121、TMP123:带 SPIŽ 接口的 1.5°C 精度数字温度传感器(R ev. B)
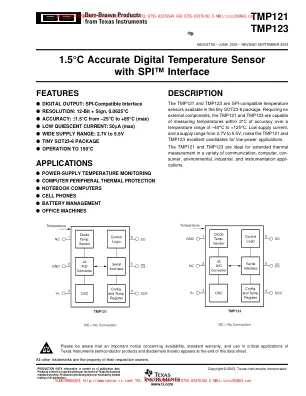
当 CS 为高电平时,TMP121 和 TMP123 会持续将温度转换为数字数据。CS 必须保持高电平至少一个转换时间(最大 320ms)才能更新温度数据。通过将 CS 拉低来启动从 TMP121 和 TMP123 读取温度数据,这将导致任何正在进行的转换终止,并使设备进入模拟关断状态。在模拟关断期间,静态电流降低至 1 µA。一旦 CS 被拉低,在 CS 下降之前来自上次完成的转换的温度数据将被锁存到移位寄存器中,并在 SCK 下降沿的 SO 上输出。16 位数据字首先输出符号位,然后是 MSB。在升高 CS 之前可以读取 16 位字的任何部分。TMP121 和 TMP123 通常需要 0.25 秒才能完成一次转换,在此期间消耗 50 µ A 电流。如果 CS 保持高电平的时间超过一个转换时间周期,则 TMP121 和 TMP123 将进入空闲模式 0.25 秒,仅需要 20 µ A 电流。每 0.5 秒开始一次新转换。图 2 描述了 TMP121 和 TMP123 的转换时序。
TMP121、TMP123:带 SPIŽ 接口的 1.5°C 精度数字温度传感器(R ev. B)
当 CS 为高电平时,TMP121 和 TMP123 会持续将温度转换为数字数据。CS 必须保持高电平至少一个转换时间(最大 320ms)才能更新温度数据。通过将 CS 拉低来启动从 TMP121 和 TMP123 读取温度数据,这将导致任何正在进行的转换终止,并使设备进入模拟关断状态。在模拟关断期间,静态电流降低至 1 µA。一旦 CS 被拉低,在 CS 下降之前来自上次完成的转换的温度数据将被锁存到移位寄存器中,并在 SCK 下降沿的 SO 上输出。16 位数据字首先输出符号位,然后是 MSB。在升高 CS 之前可以读取 16 位字的任何部分。TMP121 和 TMP123 通常需要 0.25 秒才能完成一次转换,在此期间消耗 50 µ A 电流。如果 CS 保持高电平的时间超过一个转换时间周期,则 TMP121 和 TMP123 将进入空闲模式 0.25 秒,仅需要 20 µ A 电流。每 0.5 秒开始一次新转换。图 2 描述了 TMP121 和 TMP123 的转换时序。
TMP121、TMP123:具有 SPIŽ 接口的 1.5°C 精度数字温度传感器 (R ev. B)
当 CS 为高电平时,TMP121 和 TMP123 会持续将温度转换为数字数据。CS 必须保持高电平至少一个转换时间(最大 320ms)才能更新温度数据。从 TMP121 和 TMP123 读取温度数据时,需要将 CS 拉低,这将导致任何正在进行的转换终止,并使器件进入模拟关断状态。在模拟关断期间,静态电流降至 1µA。一旦 CS 被拉低,在 CS 下降之前最后一次完成的转换的温度数据将被锁存到移位寄存器中,并在 SCK 下降沿的 SO 上输出。16 位数据字首先输出符号位,然后是 MSB。在提高 CS 之前可以读取 16 位字的任何部分。TMP121 和 TMP123 通常需要 0.25 秒才能完成转换,在此期间消耗 50µA 电流。如果 CS 保持高电平的时间超过一个转换时间周期,则 TMP121 和 TMP123 将进入空闲模式 0.25 秒,仅需 20 µA 电流。每 0.5 秒开始一次新转换。图 2 描述了 TMP121 和 TMP123 的转换时序。
TMP121、TMP123:具有 SPIŽ 接口的 1.5°C 精度数字温度传感器 (R ev. B)
当 CS 为高电平时,TMP121 和 TMP123 会持续将温度转换为数字数据。CS 必须保持高电平至少一个转换时间(最大 320ms)才能更新温度数据。从 TMP121 和 TMP123 读取温度数据时,需要将 CS 拉低,这将导致任何正在进行的转换终止,并使器件进入模拟关断状态。在模拟关断期间,静态电流降至 1µA。一旦 CS 被拉低,在 CS 下降之前最后一次完成的转换的温度数据将被锁存到移位寄存器中,并在 SCK 下降沿的 SO 上输出。16 位数据字首先输出符号位,然后是 MSB。在提高 CS 之前可以读取 16 位字的任何部分。TMP121 和 TMP123 通常需要 0.25 秒才能完成转换,在此期间消耗 50µA 电流。如果 CS 保持高电平的时间超过一个转换时间周期,则 TMP121 和 TMP123 将进入空闲模式 0.25 秒,仅需 20 µA 电流。每 0.5 秒开始一次新转换。图 2 描述了 TMP121 和 TMP123 的转换时序。