XiaoMi-AI文件搜索系统
World File Search System方位

使用两个优化相变的全场模式分选器用于高维量子密码学
摘要 高维编码方案已成为执行量子信息任务的一种新方法。对于高维,光子的时间和横向空间模式是此类实验中常用的两个典型自由度。尽管如此,仍然需要用于多结果测量的通用设备来充分利用编码方案的高维性质。我们提出了一种基于进化算法的通用全场模式排序方案,该方案仅由最多两个优化的相位元素组成,可以对方位和径向模式进行联合排序。我们通过高维量子密码学背景下的模拟进一步研究了我们方案的性能,其中在不同的相互无偏基和高保真度测量方案中进行排序至关重要。

国际工程与先进技术杂志 (IJEAT)
运动时周围环境或环境突然变化。通过高灵敏度的气流传感器快速检测安全传感器的效果使系统能够以比任何传统安全系统更高的精度识别和分析关键条件。先前的研究已经开发出宏流体气流传感器,该传感器可以更高精度地观察气流,而运动中的传感器将通过比传统传感器更高的灵敏度检测气流传感器的相对速度来验证。进行了一项实验研究,通过控制速度范围(30 至 110 公里/小时)来验证风洞中的宏流体气流传感器。结果显示了电压读数随风洞中气流速度变化的特性。传感器 1 至 4 被放置在 0 至 360 度的方位上,空间间隔分别为 90 度。

使用扩展卡尔曼滤波器对声呐浮标进行主动对象跟踪
使用扩展卡尔曼滤波器对声纳浮标进行主动物体跟踪 1 Ch.Lakshmi Sravya、2 G.Mahesh、3 S.Koteswara Rao、4 B.Omkar Lakshmi Jagan 1,2,3 电子与计算机工程系、4 电子与电气工程系,K L 大学,贡土尔,印度 1 lakshmi.sravi7@gmail.com、2 mahesh88088@gmail.com、3 skrao@kluniversity.in、4 lakshmijagan@kluniversity.in 摘要:在水下,声纳浮标接收物体信息。声纳浮标生成物体距离和方位测量值。扩展卡尔曼滤波器用于处理噪声破坏的测量值,以生成物体运动参数 (OMP)。OMP通过超高频链路与飞机进行进一步处理。给出了模拟结果。关键词-全球定位系统、声纳浮标、物体运动分析、随机处理、统计随机处理
DCS 世界 Su-25T
综合电子战 (EW) 系统可对空中、地面和海军雷达发射器进行探测和测向,方位角精度为 +/- 30 度。EW 系统可以检测和分类在 1.2-18 GHz 频段发射的雷达。可调节的电子攻击 (EA) 干扰可用于降低以连续波和脉冲模式运行的武器控制雷达的有效性。EA 吊舱可以固定在机翼下悬挂硬点上。为了防御红外制导导弹,使用一次性照明弹。Su-25T 配备了 192 枚照明弹。此外,为了防御红外制导导弹,在飞机尾部安装了电光干扰系统“Sukhogruz”。这款能耗为 6 千瓦的强大铯灯可产生调幅干扰信号,阻止红外制导导弹进行制导。

采用两种优化相变的全场模式分类器用于高维量子密码学
摘要 高维编码方案已成为执行量子信息任务的一种新方法。对于高维,光子的时间和横向空间模式是此类实验中常用的两个典型自由度。尽管如此,仍然需要用于多结果测量的通用设备来充分利用编码方案的高维特性。我们提出了一种基于进化算法的通用全场模式排序方案,该方案仅由最多两个优化的相位元素组成,可以对方位和径向模式进行联合排序。我们通过高维量子密码学背景下的模拟进一步研究了我们方案的性能,其中在不同的相互无偏基中进行排序和高保真度测量方案至关重要。

AD 2 - EGDM - 1 - 1 英国军事 AIP BOSCOMBE DOWN
备注:1. 在 25 海里处可能无法实现航向道覆盖。3000 英尺以下 C/L 的 R 为 8 度 2. MSSR - 授予“受限”状态,不得在 65 海里以外使用。3. TACAN:机组人员在 164 度径向上可能会遇到方位摆动。ATC 没有 TACAN 可用性的视觉指示器,因此机组人员可自行决定使用。当 ATC 被告知不能使用 TACAN 时,将发布 NOTAM。4. ILS:请注意,ILS RDH(参考基准高度)设置为 46 英尺,与 ICAO 建议的 15 米(50 英尺)不一致,允许的公差为正 3 米(10 英尺),如英国 Mil Gen 1.7 中所述。5. 航向道和 DME 识别不同步。

CDL HAWKLINK AN/SRQ-4 无线电终端机 - L3Harris
产品描述 L3Harris Hawklink AN/SRQ-4 船载终端是完全合格的通信系统,可满足美国海军 DDG-51、CG-47 和 FFG-7 级舰艇舰队的要求。控制系统采用现代开放系统架构,配备最新的触摸屏界面,便于控制和显示状态。强大的内置测试消除了复杂的支持设备,并减少了物流占用空间。42 英寸定向天线通过实施方位伪单脉冲跟踪同时开环指向仰角以避免水面多径欺骗,从而最大限度地提高链路性能。自动在全向天线和定向天线之间切换,实现从起飞到最大射程的无缝操作。完全合格的天线罩与现有船舶接口相匹配,并针对 Ku 波段进行了优化。
![2022 年第 16 届欧洲天线和传播会议 (EuCAP) [EuCAP 2022] 计划](/simg/c\c5f583d2c4872b4be36153361e313e7fb6a12e6e.webp)
2022 年第 16 届欧洲天线和传播会议 (EuCAP) [EuCAP 2022] 计划
本文介绍了用于 5G 端射应用的 SICL 馈电宽带 MIMO 天线阵列。阵列中的辐射元件是一种改进的偶极天线,倾斜 ±45 度,以避免阵列配置中连续元件之间的重叠。一个臂放在顶部,而另一个臂放在底部基板上,分别由 SICL 线的顶部和中间板(使用馈电通孔)馈电。偶极天线臂的上下排列使阵列尺寸更加紧凑。SICL 技术的另一个优势是,当一个端口被激励时,可以减少另一个端口的耦合,从而使用 SICL 实现高隔离度。建议采用四元件 MIMO 天线阵列实现 360 度方位覆盖,增益为 6 dBi,阻抗带宽为 5.6 GHz,28 GHz 时交叉极化水平低于 13.6 dB。
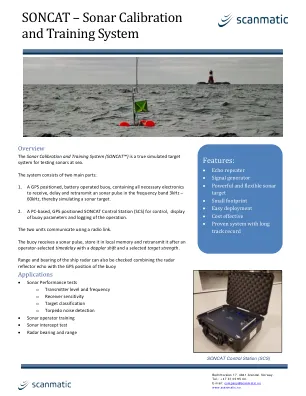
SONCAT – 声纳校准和训练系统
概述 声纳校准和训练系统 (SONCAT™) 是用于测试海上声纳的真实模拟目标系统。该系统由两个主要部分组成: 1. GPS 定位、电池供电的浮标,包含所有必要的电子设备,用于接收、延迟和重新发送 3kHz – 60kHz 频段的声纳脉冲,从而模拟声纳目标。 2. 基于 PC、GPS 定位的 SONCAT 控制站 (SCS),用于控制、显示浮标参数和记录操作。两个单元使用无线电链路进行通信。浮标接收声纳脉冲,将其存储在本地内存中,并在操作员选择的延时后以多普勒频移和选定的目标强度重新发送。还可以结合雷达反射器回波和浮标的 GPS 位置来检查船舶雷达的距离和方位

了解 S 模式技术 - 技能共享
机身识别和高度报告。这曾经是、现在仍然是空中交通管制和空域管理的重要组成部分。随着越来越多的机身可供私人和商业飞行社区使用,这种基本的监视形式超出了空中交通管制雷达信标系统 (ATCRBS) 的容量。考虑到 A 和 C 模式询问和答复背后的技术,还存在错误答复与时间不相关 (FRUIT)、看到来自另一个询问的答复以及混淆一个答复干扰另一个答复的问题。这个问题类似于试图同时收听几个对话。因此,ATCRBS 的容量已达到极限。ATCRBS 还使用“滑动窗口”技术来确定飞机的方位位置。这需要多次询问和答复,从而降低了 ATC 二次监视雷达 (SSR) 的目标处理能力。S 模式系统使用