XiaoMi-AI文件搜索系统
World File Search System方向移动

神经元的反向迁移:探索大脑的进化体系结构
早期的研究主要集中在神经发生(大脑中神经元的产生)和快速的神经元迁移均在胚胎发育的早期朝着一个方向移动。但研究人员发现,神经元在出生后慢慢移动以调整其最终位置,而神经元的产后反向运动导致了从三层皮层到六层新皮层的进化过渡。他们认为,如果没有反向运动,只有紧凑的三层皮层才能发展出来,而稀疏的六层新皮层的正确形成是不可能的。
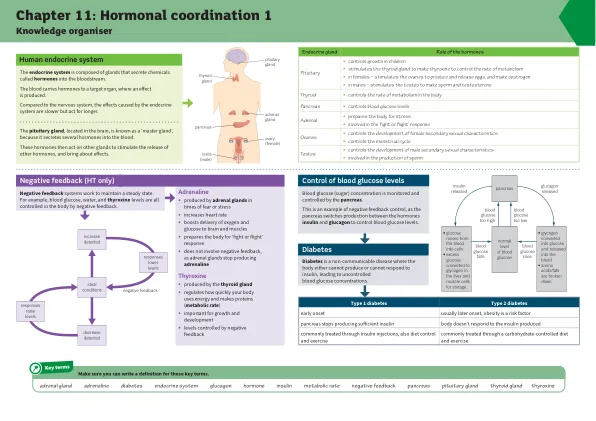
第11章 荷尔蒙协调1
植物的反应可称为向光性,即枝条向光弯曲,或向地性,即根部向重力方向移动。这些反应由激素生长素控制。在向光性中,生长素从枝条有光的一侧移动到无光的一侧,这意味着那一侧的细胞会生长得更多。在向地性中,高浓度的生长素意味着根细胞的生长受到抑制。(仅限 HT)赤霉素也是一种植物激素,它通过分解种子中的食物储存来启动种子发芽过程,并刺激茎的生长。乙烯是另一种控制细胞分裂的激素。
调查报告“绘制自然和人为气候变化影响文化和自然纪念碑/地点的脆弱性”
气候变化对文化遗产的不利影响以及应对这一挑战的紧迫性,使其对减少灾害风险和可持续发展计划的战略融合的迫切需求。的制定是保护遗产财产以及可持续发展的政策框架的发展,已被证明是成功决策过程的杠杆作用。国际机构和组织提供了解决气候变化灾难的指南和行动计划。朝着同一方向移动,FM于2007年发起了努力,建立了可靠且适用的政策框架,这导致了本报告文档。下面的时间表描述了FM的开发,从创建到政策建立和当今。

幸福与健康粒子群优化
粒子群优化 (PSO) 是一种流行且广泛使用的优化算法,用于解决复杂问题。它以简单和易于实施而闻名。人工鸟在搜索空间中移动以找到最佳解决方案。尽管文献中提出了许多 PSO 算法,但 PSO 算法中尚未探索幸福和健康等概念。本文基于这一研究空白。幸福和健康粒子群优化 (HaHePSO) 算法是通过将幸福和健康概念纳入粒子群优化算法而创建的。HaHePSO 算法中的每个粒子都与幸福和健康变量相关联。PSO 算法中人工鸟的移动基于适应度值。在 HaHePSO 算法中,人工鸟的移动取决于幸福、健康和适应度值。在 PSO 算法中,人工鸟朝着局部最佳和全局最佳适应值的方向移动。这一思想在 HaHePSO 算法中得到了扩展,其中人工鸟朝着幸福感、健康和适应值的局部最佳和全局最佳方向移动。与 PSO 算法相比,本文提出的 HaHePSO 算法占用更多空间并需要额外计算。这是因为现在每个粒子都有与之相关的幸福感和健康变量,并且搜索空间中的移动由适应度、幸福感和健康值引导。

Interbandkaskadenlaser Mit Hohen Ausgangsleistungen
图2.1:(a)锌混合晶体结构由两个在网格下的FCC组成,它们沿[111]方向移动了四分之一。它包含两种不同类型的原子,其中III主组的一个元素,另一个由V组的元素组成。网格常数A是各个连接页岩领导者的特征。(b)FCC格栅对应于倒数空间中的BCC格栅(Impulse Room)。布里渊区包含相互晶格向量B 1,B 2和B 3以及重要的对称点,γ点Bz的中心和点X和L,用[010]轴或。从[14]中删除,并以适应的形式显示。

表征高熵“Cantor”合金 CrCoMnFeNi 的疲劳行为
近年来,高熵合金 (HEA) 引起了材料界的极大兴趣,主要是因为某些成员表现出了令人着迷的特性,并且它们代表了合金设计的新方法。在这个多组分合金系统系列中,近等原子五组分“Cantor”合金 CrCoMnFeNi 尤其引人注目,因为这种合金表现出了卓越的机械性能,而且只有在温度降低到低温状态时,这种性能才会增强。尽管人们对这种合金系统很感兴趣,但迄今为止很少有人研究过这种合金或其成分变体的循环疲劳载荷行为。在这里,我研究了 Cantor 合金的耐损伤疲劳行为以及温度和载荷比对改变这种行为的影响,以及可能导致观察到的变化的潜在机制。这些测试条件涵盖三个温度范围:293 K、198 K 和 77 K;此外,还调查了在每个温度范围内增加载荷比 R 的影响。在巴黎区阈值和线性部分进行的疲劳测试表明,Cantor 合金的疲劳行为具有温度依赖性;随着温度降低到低温区,疲劳曲线向更高的 ΔK 方向移动,表明在较低温度下对疲劳裂纹扩展的抵抗力更高。此外,观察到更高的负载比对这种抵抗力产生负面影响,导致随着 R 比的增加,ΔK 向更低的方向移动。测试后,进行了一系列机械研究,以调查这种观察到的变化的根本原因。裂纹闭合测量、裂纹路径形态和断口分析提供了强有力的证据,表明粗糙度引起的裂纹闭合是主要作用机制。

使用 Arduino 的手势控制机器人 - IJRASET
摘要:本文介绍了一种使用 Arduino 的手势控制机器人,可以通过简单的手势进行控制。根据人的手部运动,加速度计开始移动。它基于加速度计的 3 轴,机器人向前、后、左、右四个方向移动。为了感测人体运动,我们使用红外传感器,其范围是人体 790nm 波长。这种类型的机器人广泛应用于军事应用、工业机器人、建筑领域。在这样的领域,通过开关或遥控器操作机器非常危险且复杂,有时操作员可能会感到困惑,因此引入了这个新概念,通过手部运动来控制机器,同时控制机器人。关键词:Arduino 技术、手势、加速度计、红外传感器。
