XiaoMi-AI文件搜索系统
World File Search System旋翼的
使用自动编码器集成二阶滑模控制和异常检测以增强安全性和可靠性
摘要 本文提出了一个综合框架,通过集成二阶滑模控制 (2-SMC) 和基于机器学习和人工智能的先进异常检测和预测系统来提高四旋翼无人机的安全性和可靠性。本文提出了一种新的滑动流形方法,分为两个子系统,用于精确的位置和姿态跟踪,解决了设计四旋翼控制器的挑战。本文还使用 Hurwitz 稳定性分析对滑动流形的非线性系数进行了详细分析。它通过大量的模拟结果证明了所提方法的有效性。为了进一步评估四旋翼的安全性和可靠性,将异常检测和预测系统与位置和姿态跟踪控制相结合。该系统利用机器学习和人工智能技术实时识别和预测异常行为或故障,使四旋翼能够快速有效地应对危急情况。所提出的框架为设计四旋翼无人机的稳健和安全控制器提供了一种有前途的方法。它展示了先进的机器学习和人工智能技术在提高自主系统安全性和可靠性方面的潜力。

umi-5771.pdf
1 简介 1 1.1 背景:微型飞行器 ....................1 1.2 需要更高效的悬停微型飞行器 ............3 1.3 带罩旋翼配置:性能提升潜力 10 1.4 管道螺旋桨和带罩旋翼的先前研究 ......26 1.4.1 历史概述 .......................26 1.4.2 实验工作:罩壳设计变化的影响 ...32 1.4.2.1 早期工作 ...................42 1.4.2.2 直升机尾桨 ................58 1.4.2.3 无人机 .................68 1.4.3 实验工作:单个带罩转子模型的测试 ..86 1.4.4 性能预测的分析方法 .........87 1.4.4.1 叶片元和势流方法 ......88 1.4.4.2 计算流体动力学方法 .......93 1.4.5 其他带罩旋翼研究 ................96 1.4.5.1 噪声考虑 ...................96 1.4.5.2 翼尖间隙流动物理 ...................100 1.4.5.3 笼罩旋翼无人机稳定性和控制 .......101 1.4.5.4 环形翼的行为 ...............103 1.5 低雷诺数转子空气动力学 .................103 1.6 当前研究的目标和方法 ............。104
参议院修正案,向H.R. 5305,扩展政府资金和外壳1
封闭1对2024财年预算水平低于2023财年的NASA预算水平的影响,NASA颁布了2024财年的2024财年预算等于22%,低于2023财年NASA颁布的25.4B $ 25.4B的预算将为$ 19.8B,或从FY 2023级别降低了5.6B美元。下面的信息概述了NASA Mission Direction,减少$ 5.6B将如何影响代理机构任务。NASA Science: Reduction of $1.7B from FY 2023 enacted level, for a FY 2024 level of $6.1B A reduction of this magnitude would threaten NASA's ability to continue making critical advancements in all Science disciplines, and threaten NASA's international leadership in areas of National priority: Planetary Science: Significant impacts to Planetary missions and research: o Delay or cancel the Mars Sample Return (MSR) mission,与欧洲航天局的合作伙伴关系,将火星材料的第一批样品带回地球进行详细研究,包括已经由火星毅力漫游者收集/缓存的样品。延迟/取消将威胁到美国对这一开创性任务的领导,破坏了美国与中国的竞争,并随着持久漫游者的进一步衰老而增加了任务风险。o延迟或取消Davinci,这是一项以空前的细节研究来源,进化和现在的金星状态的使命,从云层的顶部附近到地球的表面。o延迟或取消蜻蜓,这是向土星的月球泰坦运送旋翼的使命,以推动我们寻找生命的基础。地球科学:对地球科学任务,研究和技术的重大影响,包括地球系统天文台(ESO)。天体物理学:重大影响包括:o最多取消三个ESO任务,并将一个ESO任务推迟了1 - 2年。ESO将提供关键信息,以指导与气候变化,缓解自然危害,抗击森林大火和改善农业过程有关的工作。取消/延迟将威胁国际贡献,并延迟衰老调查推荐的科学的进步,这可能会使美国在气候研究中的领导能力。o大大延迟了Landsat的下一个任务,该任务为下一代Landsat用户提供了最长的地球地面空间记录和新功能的连续性。o在地球探险家/风险投资类计划中延迟了针对中小型工具/任务的新竞争机会,以解决关键的地球科学和应用需要o需要减少商业数据购买,技术和研究投资,并有可能取消先前授予的赠款。
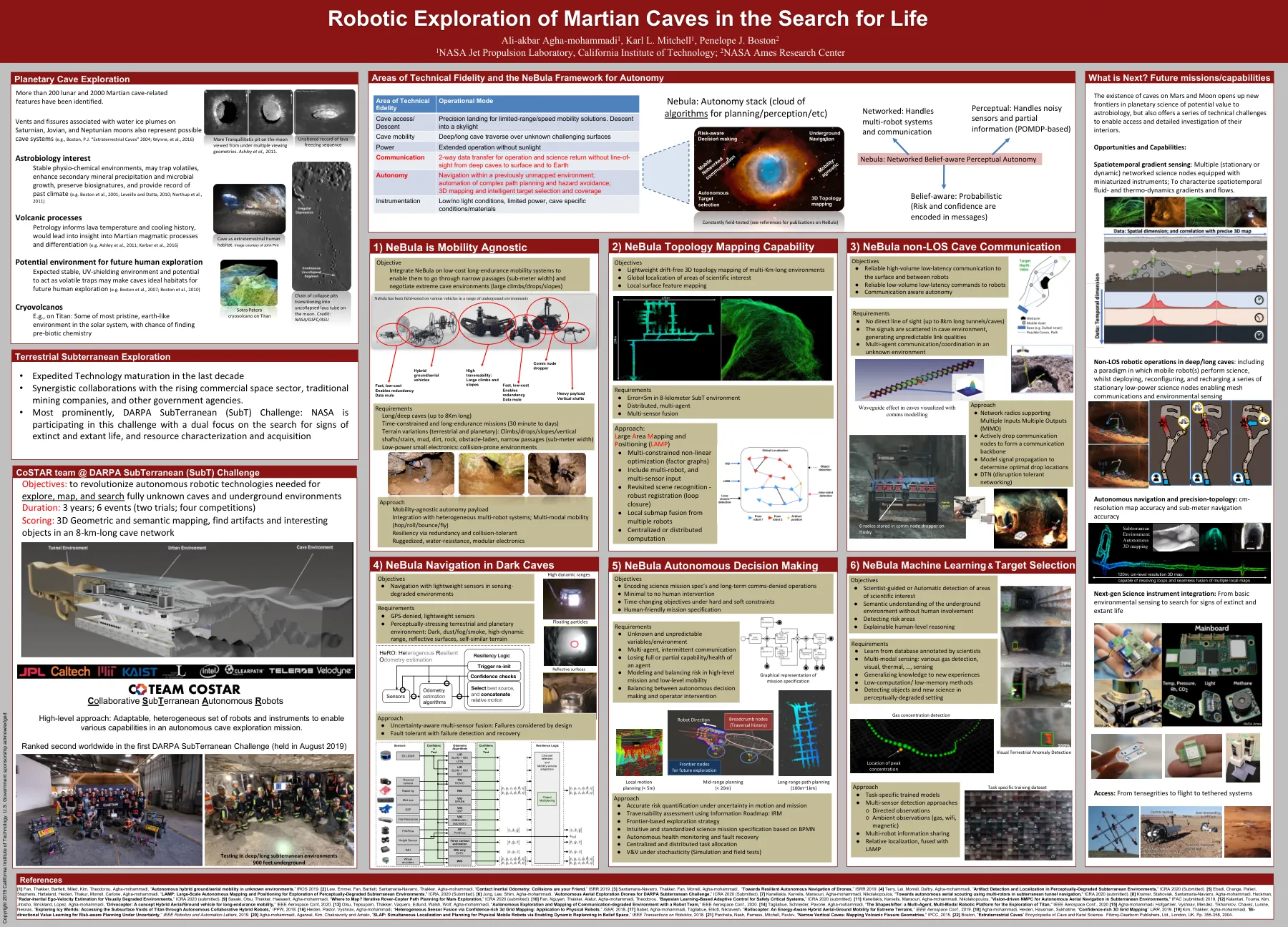
机器人探索火星洞穴寻找生命
[1] Fan,Thakker,Bartlett,Miled,Kim,Theodorou,Agha-Mohammadi,“自动杂种地面/未知环境中的空中移动性”,IROS 2019。[2] Lew,Emmei,Fan,Bartlett,Santamaria-Navarro,Thakker,Agha-Mohammadi,“接触惯性探测:碰撞是您的朋友,” ISRR2019。[3] Santamaria-Navarro,Thakker,Fan,Morrell,Agha-Mohammadi,“迈向无人机的弹性自动导航”,ISRR2019。[4] Terry,Lei,Morrell,Daftry,Agha-Mohammadi,“感知衰落的地下环境中的伪影检测和定位”,ICRA 2020(提交)。[5] Ebadi,Change,Palieri,Stephens,Hatteland,Heiden,Thakur,Morrell,Carlone,Carlone,Agha-Mohammadi。“灯:大规模的自主映射和定位,用于探索感知衰落的地下环境,” ICRA,2020年(提交)。[6] Jung,Lee,Shim,Agha-Mohammadi,“ DARPA地下挑战的自动空中勘探无人机”,ICRA 2020年(提交)。[7] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下隧道导航中使用多旋转器使用多旋翼的自主空中搜寻”,ICRA 2020(提交)。[8] Kramer,Stahoviak,Santamaria-Navarro,Agha-Mohammadi,Heckman,“视觉上降解环境的雷达惯性自我效率估计”,ICRA 2020(提交)。[9] Sasaki,Otsu,Thakker,Haesaert,Agha-Mohammadi,“在哪里映射?迭代的漫游者 - 弯曲器路径计划火星探索,” ICRA 2020(提交)。[10] Fan,Nguyen,Thakker,Alatur,Agha-Mohammadi,Theodorou。“基于贝叶斯学习的自适应控制对安全关键系统的自适应控制”,ICRA 2020(提交)。[11] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下环境中进行自主空中航行的视觉驱动的NMPC,IFAC(提交),[12],[12] [12]长期耐药性活动的概念混合空中/地面车辆。[13] Otsu,Tepsuporn,Thakker,Vaquero,Edlund,Walsh,Walf,Wolf,Agha-Mohammadi,“与机器人团队对贫困环境的自动探索和映射”[14] Tagliabue, Schneider, Pavone, Agha-mohammadi, “ The Shapeshifter: a Multi-Agent, Multi-Modal Robotic Platform for the Exploration of Titan, " IEEE Aerospace Conf., 2020 [15] Agha-mohammadi, Hofgartner, Vyshnav, Mendez, Tikhomirov, Chavez, Lunine, Nesnas, “探索冰冷的世界:通过自动协作混合机器人访问泰坦的地下空隙,” IPPW,2018。[16] Heiden,牧师,Vyshnav,Agha-Mohammadi,“通过置信度丰富的3D网格映射:应用于物理机器人的异质传感器融合:Iser,2018年。[17] SABET,AGHA-MOHAMMADI,TAGLIABUE,ELLIOTT,NIKRAVESH,“滚筒式:能源吸引能量的混合杂种空中地形迁移率对极端地形”,IEEE Aerospace Conf。,2019年。[18] Agha-Mohammadi,Heiden,Hausman,Sukhatme,“信心丰富的3D网格映射” IJRR,2019年。[19] Kim,Thakker,Agha-Mohammadi,“不确定性下的风险感知计划的双向价值学习”,IEEE机器人和自动化信,2019年。[21] Parcheta,Nash,Parness,Mitchell,Pavlov,“狭窄的垂直洞穴:映射火山裂缝几何形状”,IPCC,2015年。pp。[20] Agha-Mohammadi,Agarwal,Kim,Chakravorty和Amato,“ Slap:通过在信仰空间中启用动态重建的物理移动机器人的同时本地化和计划,”机器人技术的IEEE Transactions,2018。[22]波士顿,“洞穴和喀斯特科学的百科全书”。Fitzroy-Dearborn Publishers,Ltd。,英国伦敦。355-358,2004。