XiaoMi-AI文件搜索系统
World File Search System无流量
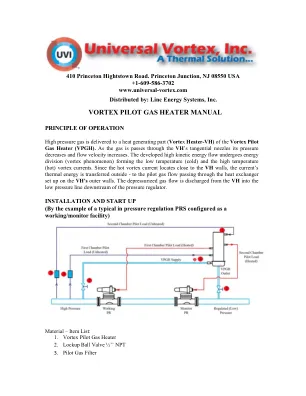
涡流引燃气加热器手册
4. VPGH 上游和下游的压力表安装在靠近设备的位置。在正确的 VPGH 设置下(入口和出口管线没有限制),上游压力表读数等于主管线的上游压力。相应地,VPGH 出口处的读数等于主管线的下游压力。5. 如果 PRS 可能出现无流量条件(零需求),则需要关闭阀以防止下游过压。建议在 VPGH 上游使用 ¾'' Fisher 627M 或在 VPGH 出口侧使用自操作 Fisher 627。Fisher 627M 感应下游压力,其设定点高于主调节器输送压力(与弹簧的操作范围成比例),因此,在完全打开或完全关闭的位置运行。在 VPGH 高压应用中(入口 PRS 压力等于或高于 1,000 psi),建议使用直径为 ¼'' 的 Fisher 孔口。 3/8 英寸孔口适用于低和中等 PRS 入口压力

577 数据库
在等待或清除时间 Tw 或 Tp 期间,设备会验证是否存在寄生火焰信号,以及内部电路是否正常运行。如果设备用于风扇辅助应用,则验证气压开关是否处于 N.C.(常闭)或“无流量”位置。接通风扇电源后,设备不会开始操作序列,直到 N.O.(常开)或“流量”位置在气压开关上激活。在预定的等待时间 Tw 或清除时间 Tp 之后,内置点火器和燃气阀通电。这开始安全时间 Ts。点火火花将点燃气体,火焰将被电极感应到。如果没有火焰,系统会在定义的间歇时间后重复点火循环一定次数,如果没有火焰,系统将进入锁定位置。感应到火焰后,高压火花将被抑制,燃气阀将保持通电。当恒温器打开时,阀门和风扇断电,控制器返回待机模式。577 DBC 的安全时间在所有操作条件下都有恒定的持续时间,特别是不依赖于压力开关切换的时刻。
完善洞穴鱼和洞穴的采样协议……
抽象的地下栖息地代表了许多保护策略中的焦点栖息地;但是,这些环境是最难采样的。新的抽样方法,例如环境DNA(EDNA),显示出有望改善造型的检测,但采样偏差的来源却很差。因此,我们确定了使用传统的视觉调查和eDNA调查对洞穴鱼类和洞穴小龙虾的传统视觉调查和EDNA调查影响检测概率的因素,并证明了检测如何影响这些分类单元的调查工作。我们在Ozark Highlands Ecoregion上抽样了40个地点(179个视觉和183次EDNA调查)。我们使用两种调查方法在不同的环境条件下估计了洞穴鱼鱼和山洞鱼的检测概率。EDNA或视觉调查的有效性因环境条件(即水量,典型基材和水速度)和目标分类单元而异。当在平均水速度,无流量和粗底物的区域进行采样时,EDNA调查的检测概率(0.49)比视觉调查(0.35)更高(0.35)(0.35)(0.67)的检测概率(0.67)的检测概率高于EDNA调查的概率(0.40)的检测概率(0.40)。在相同的采样条件下,需要进行10项埃德纳调查,以确保洞穴

人类机器人协作中的流动 - 在工业场景中的多数分析和感知的挑战检测
流动或轻松的关注通常被描述为最佳体验的状态。它的特征是高水平的参与感,一种控制感和完全沉浸在活动中(Csikszentmihalyi,2000; Nakamura和Csikszentmihalyi,2002; Csikszentmihalhi,2020年)。当任务提出的挑战与个人的技能和能力相匹配时,这种状态就会出现。流与内在动机,享受和集中注意力有关,从而改善了表现和积极的体验。虽然Extensiveresearch(Nah等,2014; Stamatelopoulou et al。,2018; Dos Santos等,2018; Pearce,2005)在各个领域的流量概念上进行了进行,例如体育,教育和游戏,其在工业设置中的应用仍然相对未探索。此外,文献中有关流量经验的任务在精神上是苛刻的,这在工业任务中并不是典型的。考虑到流动在优化绩效和工作中的重要性(Csikszentmihalyi和Lefevre,1989; Csikszentmihalhi,2020),必须弥合这一研究鸿沟并探索工业环境中的流量经验(Fullagar等,2018; Beyrodt; Beyrodt; Beyrodt et et 2023;为了解决这一差距,我们在实验室工作单元中设计了一个集会任务,非常类似于工业环境。此任务涉及参与者与合作机器人(Cobot)之间的合作,以组装变速箱。这使我们能够在类似行业的人类机器人协作(HRC)任务中分析对不同挑战水平的情感和生理反应。通过调整柯伯特的生产率,我们创造了三个不同的挑战水平,这些挑战与流动研究(无聊,流动和焦虑)中的三个常见状态相对应。工业设置中的组装任务通常涉及重复和固定程序。结果,工人逐渐获得了必要的技能来熟练执行任务,从而导致其个人技能水平随着时间的流逝而差异很小。在这种情况下,影响流量经验的主要因素成为任务提出的挑战水平。工业任务的这一独特方面使我们特别研究了不同的感知挑战水平如何引起不同的反应。认识到,当感知到的挑战和技能之间存在平衡时,我们的目标是通过调整挑战水平来调整任务,以促进Cobot工人之间的流动。最近的研究(Lee,2020; Rissler等,2020; Di Lascio等,2021)探索了通过生理信号对工作时的自动检测。他们检测到流量的存在(流动与无流量)或分类流动强度(低与高)。但是,考虑到工业集会任务的具体特征,我们采取了不同的方法 - 检测到感知到的挑战水平。这种方法逻辑上符合我们调整任务挑战水平的目标。此外,处理任务的感知挑战通常比操纵流程体验本身更容易。通过我们的分析,我们已经培训了这部分是因为在挑战和技能之间达到平衡是必需的,但它本身并不足够。总而言之,我们的贡献涉及调查面部情绪估计(价和唤醒)和心率变异性,作为在工业组装任务背景下感知到的挑战水平的指标。