XiaoMi-AI文件搜索系统
World File Search System时钟信号

用于量子密钥分发的参考时钟信号分发
解决 QKD 中符号同步的一个直观方法是使用成对光纤通过不同信道传输参考信号和量子数据信号。然而,温度会导致成对光纤之间产生延迟,从而导致同步精度下降 [Tanaka et al. 2008]。时分复用 (TDM) 方案克服了这个问题,其中同步脉冲从量子脉冲中滞后传输。然而,TDM 方案带来了其他问题,例如比特率限制,因为这些技术要求量子信号和参考信号之间有足够长的时间间隔 [Tanaka et al. 2008]。最近,已经提出了不同的 QKD 时钟恢复算法,避免使用额外的经典参考信号。在 [Pljonkin and Rumyantsev 2016] 中,提出了一种同步算法,其中时间帧被划分为更小的时间窗口,同步时间为 788 。 6 ms,同步失败概率为0.01%。在[Rumyantsev and Rudinskiy 2017]中,作者提出了一种不包括时间帧划分的算法,提供更快的同步时间3.216 ms,错误概率为0.0043%。然而,后者只能应用于站间距离不超过几十公里的QKD系统,而前者可以应用于数百公里的QKD系统。另一方面,
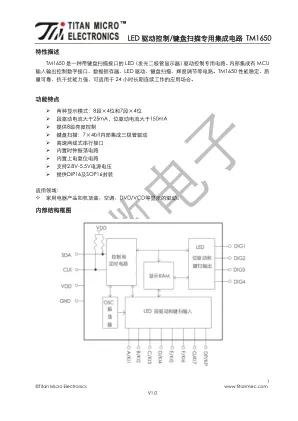
LED 驱动控制/键盘扫描专用集成电路TM1650
接口和TM1650 通信,在输入数据时当SCL 是高电平时,SDA 上的信号必须保持不变;只有SCL 上的 时钟信号为低电平时,SDA 上的信号才能改变。数据输入的开始条件是SCL 为高电平时,SDA 由高变
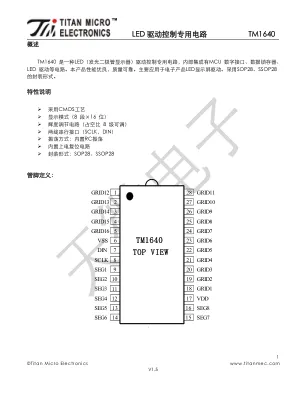
LED 驱动控制专用电路TM1640
微处理器的数据通过两线总线接口和TM1640 通信,在输入数据时当CLK 是高电平时,DIN 上的信号必须 保持不变;只有CLK 上的时钟信号为低电平时,DIN 上的信号才能改变。数据的输入总是低位在前,高位在后 传输.数据输入的开始条件是CLK 为高电平时,DIN 由高变低;结束条件是CLK 为高时,DIN 由低电平变为高 电平。

TPS62040 TPS62042,TPS62043 TPS62044,TPS62046
在PWM操作过程中,转换器使用唯一的快速响应电压模式控制器方案,并使用输入电压馈电 - for -for -for -for -For -For -For -For -For -Forne for -Fore and Load Condulation,从而允许使用小的陶瓷输入和输出电容器。在每个时钟周期开始时,时钟信号启动的时钟循环(s)p通道MOSFET开关打开,电感器电流逐渐升起,直到比较器行程和控制逻辑关闭开关。当前限制比较器还关闭开关,以防超过P通道开关的当前限制。在防止电流射击的时间后,N通道MOSFET整流器被打开,电感器电流升至下降。下一个周期是由时钟信号启动的,再次关闭N通道整流器并打开P通道开关。

LED 像素和灯条的电池供电
LED 灯带对从哪一侧接收电源没有要求,只要求接收数据。如果情况真的需要,您可以在灯带的输出端连接电池组(如果使用二极管,则带二极管)然后从输入端的 + 和 - 连接为 Arduino 供电(以及串行数据和时钟信号)。但是不建议这样做,因为电压会沿着灯带的长度略有下降,并且 Arduino(应该运行所有功能)会在电池耗尽时更快耗尽。在靠近电池的地方为 Arduino 供电可确保电压正常,从而尽可能长时间保持控制。

在65 nm技术中,用于精确时钟的新型辐射耐力低功率循环IP块
摘要:如今,现代粒子物理实验的前端电子设备需要非常精确的时钟信号,以供读取链中的不同元素。时钟分配系统,模拟和数字转换器的时间,千兆串行链路是需要抖动非常低的时钟信号的组件的示例。拟议的项目旨在开发新的辐射耐受性相锁环(PLL)IP块,用于抖动低于10 ps的时钟信号生成,或者在PLL控制中添加数字路径的情况下更好。该块将在现代TSMC 65 nm技术中开发,以允许其在EIC项目中考虑的未来读数ASIC中,尤其是在我们团体目前正在开发的SALSA MPGD读数芯片中。PLL也可以是具有相调整功能的低功率独立时钟扇出ASIC的基础,这对于特定的EIC前端应用可能需要。该项目将涵盖IP块的仿真和设计及其原型制作和验证。
Kneron KL720 系列 AI SoC 初步数据表
2.7 I2C KL720 系列中的 I2C 可配置为作为 I2C 总线上的主设备或从设备。主设备是启动总线上的数据传输并生成时钟信号以允许传输的设备。在这些传输期间,任何寻址设备都被视为从设备。数据通过缓冲接口从 I2C 总线发送和接收。两条线,串行数据 (SDA) 和串行时钟 (SCL),在连接到总线的设备之间传输信息。
空间应用LWIR检测器电子的设计和分析
•PICO1024是一个高分辨率1024x768图像传感器,音高为17 µm•对LWIR(8至14 µm)光谱范围敏感•基于无需硅(α-SI)的频谱范围•基于无需硅温度(α-SI)•-40°C至 +85°C之间的工作温度•提供-85°C•30-50 MK•热量<12 M.模拟视频信号(最多4个输出)•输入时钟信号:主时钟,集成时间,重置框架同步

基于亚微米级 MOS 晶体管的模拟开关...
本文首先对开关配置中的 MOS 器件进行了深入研究。然后分析了改进的开关架构,以便更好地将它们集成到复杂的应用中 [4-8]。强调了使用串行接口进行数字控制的模拟开关的优势。具体来说,我们专注于由数字控制块启用或禁用的多通道开关的设计。展示了为实现而设计的内部结构、主要电气参数和布局。这些架构的验证是通过数字和晶体管级模拟、静态时间分析和噪声研究完成的。我们将在一个 8 通道系统上介绍当前的结果,该系统的工作频率从 2.5 MHz [6] 增加到 55 MHz 时钟信号,与逻辑电平的偏差很小 [7]。

FLODAC - 纯流体数字计算机 - Gwern.net
被执行,并且除了在条件跳转指令执行期间之外,在每个指令周期结束时加一。在步骤 1 期间,控制计数器操作存储器选择电路,并且在步骤 1 结束时,包含下一条指令的指定存储器字被读入静态寄存器。两个左边的位被解码为操作,并且该信息被发送到功能选择电路,在那里,结合步进计数器和时钟信号,生成所有指令所需的门控脉冲。两个右边的位指定操作数地址,被发送到存储器选择电路,允许读出所需的数据字。所有这些都发生在步骤 1 期间。实际的指令执行在最后三个步骤中的一些或全部期间进行。