XiaoMi-AI文件搜索系统
World File Search System时钟周期

电镜显微技术
时钟使能 (CKE) 将时钟门控到 SDRAM。如果 CKE 与时钟同步变为低电平(设置和保持时间与其他输入相同),则内部时钟从下一个时钟周期开始暂停,只要 CKE 保持低电平,输出和突发地址的状态就会冻结。CKE 变为低电平后,从下一个时钟周期开始,所有其他输入都将被忽略。当所有存储体处于空闲状态且 CKE 与时钟同步变为低电平时,SDRAM 从下一个时钟周期开始进入断电模式。只要 CKE 保持低电平,SDRAM 就会保持断电模式,忽略其他输入。断电退出是同步的,因为内部时钟被暂停。当 CKE 在时钟高电平沿之前至少“1CLK + t SS ”变为高电平时,SDRAM 将从同一时钟沿变为活动状态,接受所有输入命令。存储体地址 (BA0、BA1)


atxmega128/64/32/16a4u -avr -xmega
MicrochipAvr®Xmega®是一个基于AVR增强的RISC架构的低功率,高性能和外围8/16位微控制器的家族。通过在单个时钟周期内执行指令,AVR XMEGA设备的CPU吞吐量接近每秒100万个指令(MIPS),从而使系统设计人员可以优化功耗与处理速度。
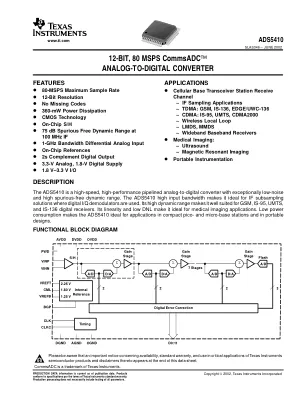
12 位、80 MSPS CommsADC?模拟数字转换器数据表
ADS5410 是一款 12 位 ADC。其低功耗(360 mW)和 80 Msps 高采样率是使用基于先进低压 CMOS 工艺构建的最先进的开关电容流水线架构实现的。ADS5410 模拟核心主要由 3.3 V 电源供电,消耗大部分电量。数字核心由 1.8 V 电源供电。如果设计中没有 1.8 V 电源,则可以使用 TPS76318 从 3.3 V AVDD 电源获取 1.8 V。为了增加接口灵活性,数字输出电源 (OV DD ) 可设置为 1.6 V 至 3.6 V。ADC 核心由 10 个流水线级和一个闪存 ADC 组成。每个阶段产生 1.5 位。每半个时钟周期,上升沿和下降沿都用于将样本通过管道传播,总共六个时钟周期。
PIC MicroControllers简介
内部振荡器电路用于生成设备时钟。设备需要执行指令和外围设备时钟。四个设备时钟周期生成一个内部指令时钟(TCY)周期。振荡器可能具有多达八种不同的模式:

混合模块冗余:探索 RISC-V 多核计算集群中的模块冗余方法,以实现太空中的可靠处理
航天器和卫星等空间信息物理系统 (S-CPS) 高度依赖机载计算机的可靠性来保证其任务的成功。仅依靠抗辐射技术成本极高,而开发不灵活的架构和微架构修改以在系统内引入模块冗余会导致面积显著增加和性能下降。为了减轻传统抗辐射和模块冗余方法的开销,我们提出了一种新颖的混合模块冗余 (HMR) 方法,该冗余方案以 RISC-V 处理器集群为特色,具有灵活的按需双核和三核锁步计算核心分组,具有运行时分锁功能。此外,我们提出了两种基于软件和基于硬件的恢复方法,以权衡性能和面积开销。我们的容错集群以 430 MHz 的速度运行,在非冗余模式下配置时,矩阵乘法基准测试中可实现高达 1160 MOPS,在双重和三重模式下分别可实现 617 和 414 MOPS。三重模式下的软件恢复需要 363 个时钟周期,占用 0.612 平方毫米,相当于非冗余 12 核 RISC-V 集群面积开销的 1.3%。作为一种高性能替代方案,一种新的基于硬件的方法可在短短 24 个时钟周期内提供快速故障恢复,占用 0.660 平方毫米,相当于基线非冗余 RISC-V 集群面积开销的 ∼ 9.4%。该集群还增强了分锁功能,可以以最小的性能损失进入可用的冗余模式之一,从而允许在独立模式下执行任务关键型代码部分,或在可靠性模式下执行性能部分,进入和退出的开销小于 400 个时钟周期。提议的系统是第一个将这些功能集成到基于 RISC-V 的开源计算设备上的系统,可实现精细可调的可靠性与性能权衡。

数字设计和计算机架构
“微架构是一种三路超标量流水线架构。三路超标量意味着,通过使用并行处理技术,处理器平均能够在每个时钟周期解码、调度和完成(退出)三条指令。为了处理这种级别的指令吞吐量,P6 处理器系列使用了支持无序指令执行的解耦 12 级超级流水线。”

AI 引擎上的波束成形实现
Xilinx AI 引擎专为各种应用(包括但不限于 5G 无线)中的密集计算而设计。一个 AI 引擎块由一个 AI 引擎、32KB 数据内存和两个用于自动数据传输的 DMA 引擎组成。每个 AI 引擎都配备了一个矢量处理器,该处理器能够在一个时钟周期内执行 32 个实数乘以实数 16 位乘法累加 (MAC) 运算。AI 引擎内的内存访问单元每个时钟周期读取 512 位操作数并写入 256 位计算结果,以匹配矢量处理器的功能。在单个 Versal™ AI Core 设备中,有数百个 AI 引擎块根据用户在编译时定义的数据流通过级联总线、AXI 流和共享本地内存互连。有关 AI 引擎的更多详细信息,请参阅 Xilinx AI 引擎及其应用 (WP506)。

DR068 - 数字化接收器 - Teledyne Defense Electronics
一般操作如下所述: • 每次检测到并测量 RF 脉冲时,DR068 都会在 FPDP 上传输脉冲描述符字。• FPDP 通信是单向的,但是,接收器能够通过断言 SUSPEND 信号来暂停 PDW 的传输。• FPDP 数据字是 32 位宽的“帧”,DR068 PDW 长度为 96 位,因此每个 PDW 传输 3 个 32 位帧 • FDPD 时钟速率为 40MHz。• PDW 传输需要 5 个时钟周期,因此在 40MHz 时,TX PDW 需要 125ns。

CD4017BC • CD4022BC 十进制计数器/除法器,带 10 个解码输出 • 8 分频计数器/除法器,带 8 个解码输出
CD4017BC 和 CD4022BC 的配置允许中速操作并确保无风险计数序列。10/8 解码输出通常处于逻辑“0”状态,仅在其各自的时隙进入逻辑“1”状态。每个解码输出保持高电平 1 个完整时钟周期。进位输出信号每 10/8 个时钟输入周期完成一个完整周期,并用作任何后续阶段的纹波进位信号。