XiaoMi-AI文件搜索系统
World File Search System望远镜

望远镜太空望远镜 div>
https://pixabay.com/th/illustrations/%B8%81%E0%B8%A 5%E0%b8%ad ad%E0%e0%B8%87%E0%E0%82%E0%B8%B8%97%97%E0%e0%B
望远镜 - ESO.org
出于技术原因,我们从定义第二阶段开始的限制开始:升级 N l T 控制系统的大部分理由来自对将安装在 VLT 上的版本的预期反馈。因此,N l T 时间表由 VLT 的时间表决定。由于望远镜控制软件 (TCS) 的最初测试不应在工作望远镜上进行,因此最初的计划预计,NTT 只会在在欧洲组装望远镜机械结构期间彻底检查 TCS 的第二个版本之后才能看到 TCS 的第二个版本。1 在米兰。由于米兰测试的当前时间表延长到 1996 年的第一周,但没有第一道曙光的延迟,因此必须开发更紧密交错的测试模式。另一个限制是,为了
望远镜 - ESO.org
出于技术原因,我们从定义第二阶段开始的限制开始:升级 N l T 控制系统的大部分理由来自对将安装在 VLT 上的版本的预期反馈。因此,N l T 时间表由 VLT 的时间表决定。由于望远镜控制软件 (TCS) 的最初测试不应在工作望远镜上进行,因此最初的计划预计,NTT 只会在在欧洲组装望远镜机械结构期间彻底检查 TCS 的第二个版本之后才能看到 TCS 的第二个版本。1 在米兰。由于米兰测试的当前时间表延长到 1996 年的第一周,但没有第一道曙光的延迟,因此必须开发更紧密交错的测试模式。另一个限制是,为了
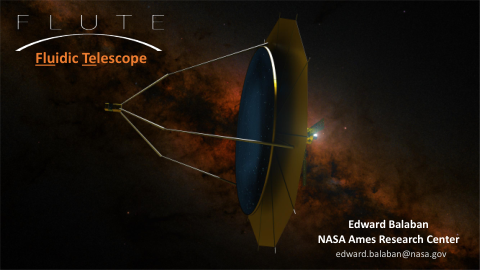


纳米卫星望远镜指向
准确稳定的航天器指向是许多天文观测的要求。特别挑战纳米卫星,因为表面积不利 - 质量比和甚至最小的态度控制系统所需的量。这项工作探讨了无执行器精度或执行器引起的干扰(例如抖动)不受限制的机构中对天体物理态度知识和控制的局限性。对原型6U立方体上的外部干扰进行了建模,并根据可用体积内的望远镜的可用恒星量和掌握限制感测知识计算。使用模型预测的控制方案集成了这些输入。对于1 Hz的简单测试用例,具有85毫米望远镜和单个11级恒星,可实现的身体指向预计为0.39弧秒。对于更一般的限制,可以整合可用的星光,可实现的态度感应大约为1毫米秒,这导致了应用控制模型后的20 milliarcseconds的预测身体指向精度。这些结果表明,在达到天体物理和环境限制之前,态度传感和控制系统的重大空间。
事件地平线望远镜协作
在本文中,我们量化了SGR a *的地平尺度发射的时间变异性和图像形态,如EHT在2017年4月的波长1.3 mm所示。我们发现,SGR A *数据表现出可变性,超过了数据中的不确定性或星际散射的影响所能解释的。这种变异性的大小可能是相关孔密度的很大一部分,在某些基准线上达到约100%。通过对简单几何源模型的探索,我们证明了与其他具有可比复杂性的形态相比,环类形态为SGR A *数据提供了更好的拟合。我们开发了两种策略,以将静态几何环模型拟合到Time-sgr a * data;一种策略将模型拟合到源是静态并平均这些独立拟合的数据的简短段,而其他拟合模型则使用参数模型与平均源结构围绕结构可变性功率谱的参数模型进行完整数据集。几何建模和图像域特征提取技术都确定环直径为51.8±2.3μ,为(68%可靠的间隔),环形厚度约束,其FWHM的FWHM约为30%和50%。要将直径测量值提高到共同的物理尺度,我们使用GRMHD模拟产生的合成数据对其进行了校准。该校准将重力半径的角度大小限制为 - + 4.8 0.7 1.4μAS,我们将其与Maser视差的独立距离测量结合在一起,以确定SGR A *的质量为´ - + 4.0 10 10 0.6 1.1 6 1.1 6 M e。统一的天文学词库概念:黑洞(162)