XiaoMi-AI文件搜索系统
World File Search System机动控制

F-16 大攻角机动控制... - eucass
非线性动态逆是针对大迎角机动问题研究最多的非线性控制技术。非线性动态逆是一种基于系统动力学逆的反馈线性化方法 [1]。通常,飞机动力学可分为两类:慢速动力学和快速动力学,F-16 也不例外。慢速动力学对于固定翼飞机是相同的,可以使用风轴微分方程推导。另一方面,快速动力学对于每架飞机都是独一无二的,在推导飞机的快速动力学时必须包括空气动力学数据库。本文使用了基于 NASA 兰利和艾姆斯研究中心的 F-16 风洞试验结果的亚音速气动数据库 [1]。该数据库适用于 和每种飞行条件。因此,它是在大攻角区域测试新开发的控制律的合适平台。在 Simulink 环境中开发了 F-16 的 6 自由度数学模型。数学模型包括气动数据库、发动机模型、大气方程和运动方程 [3]、[4]。开发了平飞、爬升、下降和稳定平转飞行条件下的配平算法 [5]。此外,还基于小扰动理论推导出了线性化算法 [6]。为了比较非线性动态逆控制律和线性控制律的性能,设计了横向和纵向运动的线性控制增强系统。采用特征结构分配技术综合了线性控制律。纵向控制器是一种简单的迎角控制指令系统,使用 F-16 飞机的短周期动力学设计而成。横向控制器是一种侧滑和稳定轴滚转速率指令系统,使用 F-16 飞机的线性化横向稳定轴方程设计而成。线性控制器的设计过程最终根据高度和速度安排增益矩阵,以实现全包络有效飞行控制律。使用预定义的大迎角机动对线性和非线性飞行控制律进行了比较。这种机动被定义为快速且同时的俯仰和滚转运动。虽然拉起运动在迎角和之间变化,但滚转运动在倾斜角保持恒定。随着攻角的增大,纵向和侧向动力学无法分离,因此增益调度线性控制器和非线性动态逆控制器的机动能力变得重要。
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
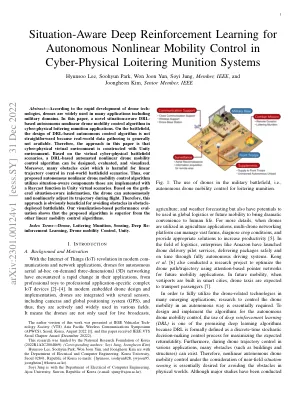
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。根据收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。基于收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。基于收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。
态势感知深度强化学习在网络物理巡飞弹药系统中实现自主非线性机动控制
摘要 —随着无人机技术的快速发展,无人机被广泛应用于包括军事领域在内的许多应用领域。本文提出了一种新型的基于态势感知 DRL 的自主非线性无人机机动性控制算法,应用于网络物理巡飞弹药。在战场上,基于 DRL 的自主控制算法的设计并不简单,因为通常无法收集现实世界的数据。因此,本文的方法是利用 Unity 环境构建网络物理虚拟环境。基于虚拟网络物理战场场景,可以设计、评估和可视化基于 DRL 的自动非线性无人机机动性控制算法。此外,在现实战场场景中存在许多不利于线性轨迹控制的障碍物。因此,我们提出的自主非线性无人机机动性控制算法利用了态势感知组件,这些组件是在 Unity 虚拟场景中使用 Raycast 函数实现的。基于收集到的态势感知信息,无人机可以在飞行过程中自主且非线性地调整其轨迹。因此,这种方法显然有利于在布满障碍物的战场上避开障碍物。我们基于可视化的性能评估表明,所提出的算法优于其他线性机动控制算法。
Shari Bennett 上校
Shari Bennett 上校担任美国陆军军事地面部署和配送司令部 (SDDC)、美国运输司令部陆军服务组成司令部和陆军物资司令部下属主要司令部的参谋长。SDDC 提供部署和配送能力以满足国家目标。Bennett 上校毕业于弗吉尼亚大学,获得社会学文学士学位,并于 1998 年被任命为运输兵团少尉。她于 2013 年获得美国军事大学的物流和运输硕士学位,2015 年获得圣路易斯大学的供应链管理证书,2021 年获得美国陆军战争学院的战略研究硕士学位。Bennett 上校之前的职位是岩岛兵工厂联合制造和技术中心第 51 任指挥官。先前的职务包括第 7 步兵师支援主管、陆军野战支援营指挥官 – 刘易斯和第 593 远征支援司令部机动支援行动负责人(华盛顿州刘易斯·麦克乔德联合基地);第 201 支援营 (FWD) 排长和营后勤官(德国菲尔塞克);第 49 运输营 (MC) 机动控制官和第 418 运输连指挥官、第 180 运输营 (Ft.德克萨斯州胡德);基本军官领导力课程教员(俄克拉荷马州西尔堡);美国陆军中央司令部 JOPES 计划官(乔治亚州麦克弗森堡);第 2 步兵师师级运输官(韩国红云营);营执行官,总部和第 2 步兵师总部营(韩国红云营);美国运输司令部(伊利诺伊州斯科特空军基地)战略、能力、政策和后勤局局长执行官。Bennett 上校完成了运输军官基础课程、联合后勤上尉职业课程、中级教育(常驻)和支援行动课程第一阶段和第二阶段。她还完成了全陆军教官培训课程、小组教官课程、联合规划师课程、联合联合作战人员课程以及联合作战规划和执行系统操作员课程。Bennett 上校部署支持科索沃部队(1999 年)和伊拉克自由行动(2003 年、2004 年、2009 年)。贝内特上校与迈克尔·贝内特先生结婚。他们有三个孩子。她曾荣获功绩勋章、铜星勋章、国防功绩服务勋章、功绩服务勋章(4 OLC)、陆军嘉奖勋章(2 OLC)、陆军成就勋章、海外服役勋章(4)、多项战役勋章、圣莫里斯勋章(美国陆军步兵守护神)和圣克里斯托弗勋章(美国运输兵团守护神)。