XiaoMi-AI文件搜索系统
World File Search System机械系统
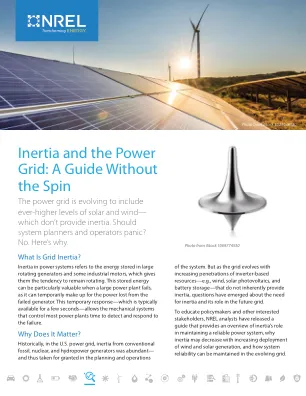
惯性和电网:无旋转指南
电力系统中的惯性是指大型旋转发电机和一些工业电动机中储存的能量,这使它们具有保持旋转的趋势。当大型发电厂发生故障时,这种储存的能量尤其有价值,因为它可以暂时弥补故障发电机造成的电力损失。这种暂时的响应(通常持续几秒钟)使控制大多数发电厂的机械系统有时间检测和应对故障。
狂欢(Ben)Yang -USC Viterbi工程学院
分布式参数系统,充气空间结构,机械系统的位置和运动控制,灵活机械系统,智能结构,微力机械系统,计算方法,工业应用教育博士的被动和主动振动控制。加利福尼亚州伯克利的机械工程大学,1989年M.S.应用机械密歇根州立大学,密歇根州东兰辛,1985年工程力学达利安技术学院,中国达利安,1982年,就业历史03/01–现任教授,部门航空航天机械工程大学南加州大学,洛杉矶,加利福尼亚州06/008/00 NASA-ASEE夏季教职员工,喷气推进实验室09/95 - 02/02/01副教授,航空航天机械工程大学南加州大学,洛杉矶,加利福尼亚州09/97-08/98副主席机械工程,USC 09/89-08/95助理教授南加州机械工程大学,洛杉矶,加利福尼亚州荣誉和奖项,美国机械工程师学会荣誉和奖项,2002年1月,诺斯罗普·格鲁曼公司优秀研究奖,1995年美国陆军研究奖,1993年NSF Research Intiation Initiation奖,1990年USC教职研究奖

可持续航空:迈向净零排放之旅 - 凯捷
数字设计工具可以帮助确定设计和架构、工程以及电气、机械系统和物理域的范围,以及它们应该如何连接。建模(由航空航天专家设计)可以帮助优化和定义机身、油箱和机翼的最有效配置,预测最佳材料选择,并设计电气、电子和机械部件的集成。如果提供明确的输入标准,人工智能 (AI) 也可以帮助提出最佳设计,从而减少错误开始的次数和制作早期物理原型的需要。

final_project_recruit_20242024 ...
设计 /开发 /分析机械系统 /子系统 /海上,浮动结构 /水下组件 /热系统 /设备,旋转机械的设计。组装,制造,集成,评估,测试和调试系统 /设备的设计,旋转机械的设计以及用于海水淡化和OTEC植物的各种其他组件,以及水下组件的实验技术管理,操作,维护,维护,维护和麻烦研究容器的射击;随访,文档,检查和监视船舶建筑物 /干dock&Foploat维修过程。部署和检索

SL。否。空缺和类别的帖子名称1。SL。否。空缺和类别的帖子名称1。
设计 /开发 /分析机械系统 /子系统 /海上,浮动结构 /水下组件 /热系统 /设备,旋转机械的设计。组装,制造,集成,评估,测试和调试系统 /设备的设计,旋转机械的设计以及用于海水淡化和OTEC植物的各种其他组件,以及水下组件的实验技术管理,操作,维护,维护,维护和麻烦研究容器的射击;随访,文档,检查和监视船舶建筑物 /干dock&Foploat维修过程。部署和检索
重要:机械计划审查豁免仅适用于对一个和两个家庭住宅提出的更改和补充。
i签名的财产所有人,请求通过标准机械计划审查的LIEU实地检查确定机械代码合规性。i HERBY认证机械系统将根据弗吉尼亚州统一的全州建筑法规的所有要求安装。i还证明,在检查专员检查时,应在工作现场上可用所有设计规格。我知道需要适当的机械许可,这项工作自负自负,可能需要过多的更改以满足代码合规性。
海军陆战队系统司令部
• GPATS 为通信电子设备、电子系统、光电和机械系统以及各种军械车辆和系统提供诊断测试和故障隔离。 • 理想状态是采用模块化配置取代旧系统以降低成本和减少浪费能力的一种系统解决方案。 • 追求更小的外形尺寸、更高的功率灵活性、模块化,并与硬件抽象层 (HAL) 软件集成以实现配置灵活性。 • 采用增量方法集成应用程序集 (APS) 并评估是否需要 APS 以及在何处需要 APS。
开放选修课II/ AY 2024-25 div>
建议阅读1。Robert J Schilling,《机器人分析与控制佩森教育公司的基础》,2007年。 2。 S. B. Niku,《机器人技术简介》 - 分析,控制,应用,第三版,Johnwiley&Sons Ltd.,2020 3。 R. K. Mittal,I。J。Nagrath,机器人和控制,塔塔·麦格劳·希尔出版公司有限公司,新德里,2003年。 4。 R. D. Klafter,Thomas A. Chmielewski和Mechael Negin,机器人工程 - Anepectation方法,EEE,EEE,Prentice Hall India,Pearson Education Inc.,2009年。 5。 J. Angeles,《机器人机械系统理论方法Andalgorithms》,Springer,1997年。 6。 S. 7。 Ashitava Ghosal,机器人技术基本概念与分析,牛津大学出版社,2006年。 8。 T. C. Manjunath,《机器人技术的基础》,Nandu打印机和出版商,2010年。 9。 DILIP KUMAR PRATIHAR,机器人基础知识,Narosa Publishing House,(2019)Robert J Schilling,《机器人分析与控制佩森教育公司的基础》,2007年。2。S. B. Niku,《机器人技术简介》 - 分析,控制,应用,第三版,Johnwiley&Sons Ltd.,2020 3。R. K. Mittal,I。J。Nagrath,机器人和控制,塔塔·麦格劳·希尔出版公司有限公司,新德里,2003年。4。R. D. Klafter,Thomas A. Chmielewski和Mechael Negin,机器人工程 - Anepectation方法,EEE,EEE,Prentice Hall India,Pearson Education Inc.,2009年。 5。 J. Angeles,《机器人机械系统理论方法Andalgorithms》,Springer,1997年。 6。 S. 7。 Ashitava Ghosal,机器人技术基本概念与分析,牛津大学出版社,2006年。 8。 T. C. Manjunath,《机器人技术的基础》,Nandu打印机和出版商,2010年。 9。 DILIP KUMAR PRATIHAR,机器人基础知识,Narosa Publishing House,(2019)R. D. Klafter,Thomas A. Chmielewski和Mechael Negin,机器人工程 - Anepectation方法,EEE,EEE,Prentice Hall India,Pearson Education Inc.,2009年。5。J. Angeles,《机器人机械系统理论方法Andalgorithms》,Springer,1997年。6。S.7。Ashitava Ghosal,机器人技术基本概念与分析,牛津大学出版社,2006年。8。T. C. Manjunath,《机器人技术的基础》,Nandu打印机和出版商,2010年。9。DILIP KUMAR PRATIHAR,机器人基础知识,Narosa Publishing House,(2019)

LMS Virtual.Lab Motion - 创新多体仿真
在构建和测试昂贵的物理原型之前开发优化的机械系统需要准确的动态运动结果。当今 CAD 软件包中的运动模块无法满足这些需求,因为它们仅限于运动范围预测和碰撞检测。相反,LMS Virtual.Lab Motion 通过包括质量、惯性、刚度、摩擦等来模拟动态系统行为,因此能够在整个产品开发过程中提供更有价值的工程见解。快速迭代模拟可以准确预测动态运动和内部负载,使工程师能够评估多种设计方案的实际性能。