XiaoMi-AI文件搜索系统
World File Search System极点



ECE 3670课程概述-Etlearronics 3E
Module I: Forward and Inverse Kinematics • Forward kinematics for 3DoF manipulators • Linear algebra review • Rotation matrices • Homogeneous transformations • Denavit-Hartenburg notation • Inverse kinematics for position and orientation • Kinematic decoupling Module II: Differential Motion • Robot Jacobian and velocity kinematics • Trajectory execution robot奇点和雅各布•脱钩•冗余和雅各布模块III:计算机视觉•线性过滤•线性滤波•兴趣点检测•边缘检测•远程检测•机器人控制模块IV:机器人控制•扭矩,速度,速度,速度,惯性矩,惯性型•二级系统•二级系统•配置系统•配置系统•置换•置换•置换•彼得系统•极点控制•极点控制•极点控制•极点控制•极点控制•

ECE 4180课程概述。页面 ECE 4450课程大纲.pdf Selkirk的气候行动旅程 - 温尼伯 曼尼托巴大学:“有什么大主意?”系列第3集,第4集希瑟·阿姆斯特朗(Heather Armstrong)肠道本能:解锁微生物组的秘密 荣誉学位的收件人的字母列表... 供应链采购和采购 mbio*1220微生物学的要点 MBIO1010:微生物学I 供应链管理和物流硕士 SCM 7046 A01&G01(3.0 CH)可持续供应链管理 微生物学的要点MBIO 1220-教学大纲 ECE 2400 - 工程算法1 什么是the-big-idea-transcript-dr-azad。 ...
Module I: Forward and Inverse Kinematics • Forward kinematics for 3DoF manipulators • Linear algebra review • Rotation matrices • Homogeneous transformations • Denavit-Hartenburg notation • Inverse kinematics for position and orientation • Kinematic decoupling Module II: Differential Motion • Robot Jacobian and velocity kinematics • Trajectory execution robot奇点和雅各布•脱钩•冗余和雅各布模块III:计算机视觉•线性过滤•线性滤波•兴趣点检测•边缘检测•远程检测•机器人控制模块IV:机器人控制•扭矩,速度,速度,速度,惯性矩,惯性型•二级系统•二级系统•配置系统•配置系统•置换•置换•置换•彼得系统•极点控制•极点控制•极点控制•极点控制•极点控制•
![arXiv:2002.07610v1 [hep-ph] 2020 年 2 月 18 日](/simg/c\c53aa8fc28290101826458357d905bb25af36ef6.webp)
arXiv:2002.07610v1 [hep-ph] 2020 年 2 月 18 日
我们从理论上分析了 D + → νe + ρ ¯ K 和 D + → νe + ¯ K ∗ π 衰变,以查看检验手性微扰理论(UChPT)幺正扩展所预测的轴矢量共振 K 1 (1270) 的双极性质的可行性。事实上,在 UChPT 中,K 1 (1270) 是由矢量和伪标量介子的相互作用动态生成的,并且获得了该共振量子数的两个极点。较低质量极点主要与 K ∗ π 耦合,而较高质量极点与 ρK 耦合,因此我们可以预期,在产生机制中对这些通道有不同的权重的不同反应会增强一个或另一个极点。我们表明,D + → νe + VP 中不同的最终 VP 通道对两个极点的权重不同,这反映在最终矢量-赝标量不变质量分布的形状中。因此,我们得出结论,这些衰变适合在实验上区分预测的 K 1 (1270) 共振双极点。

阿米塔·吉里 CV
2017 年 7 月 - 2022 年 3 月 • 印度理工学院 (IIT) 德里分校电气工程系博士学位,CGPA 为 8.85/10。 • 获得享有盛誉的总理研究奖学金 (PMRF),该奖学金颁发给该国追求其研究的优秀博士生。 • 我的论文“基于空间和解剖谐波领域的脑源定位”围绕两个极点构建:基础研究极点和应用研究极点。 • 基础研究极点 (FRP):我致力于开发新型低计算成本脑源定位算法,使用非侵入性 EEG 信号来定位神经系统疾病癫痫发作的位置。我利用高级信号处理知识将正向和逆数据模型转换为球面和头部谐波域,以实现低计算成本和高定位精度。 • 应用研究极点 (ARP):FRP 增强的空间和时间信息用于揭示神经肌肉障碍和人类运动学习能力的机制,以促进和支持人机之间的通信。对于系统开发,传统的基于分类的 BCI 通过向执行器提供离散控制信号来控制外部设备。开发了新颖的深度学习模型,用于从 EEG 信号中连续解码手部运动参数,以供实际 BCI 应用使用。

基于极地定位的地月区域空间域感知
现代太空任务越来越多地穿越地月空间,需要扩展空间感知功能。传统的空间域感知 (SDA) 系统最初并非为探测和跟踪地月物体而建造的,这可能需要购置新的传感器系统。每个系统都有许多参数,包括传感类型、高度和平台数量,这些参数可能有所不同。任何“极点位置”的一个关键优势是它的位置远在黄道平面之外,并且提供独特的、在某些情况下是正交的观察几何形状,而这种几何形状迄今为止尚未开发用于操作部署。本文讨论了极点位置轨迹的物理原理、燃料与高度的交换以及技术更新,所有这些都表明在短期内展示极点位置 SDA 能力是可行的。此外,本文设计了一个拟议的原型,使用小型航天器与地面传感器协同工作,并描述了当前可供部署的技术。
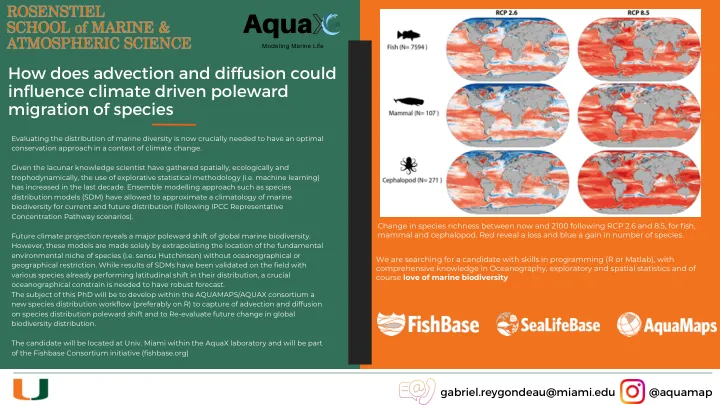
季节性如何影响全球海洋生物多样性分布
未来的气候投影揭示了全球海洋生物多样性的重大极点转移。但是,这些模型仅通过推断物种基本环境细分市场的位置而制作(即sensu hutchinson)无海洋或地理限制。尽管已经在现场验证了SDM的结果,而各种物种已经在分布中进行了纬度转移,但需要一个重要的海洋限制才能具有牢固的预测。该博士学位的主题将是在Aquamaps/Aquax Consortium中发展一个新物种分布工作流(最好在R上),以捕获对流和扩散物种分布的极点移位,并重新评估全球生物多样性分布的未来变化。