XiaoMi-AI文件搜索系统
World File Search System架窄体
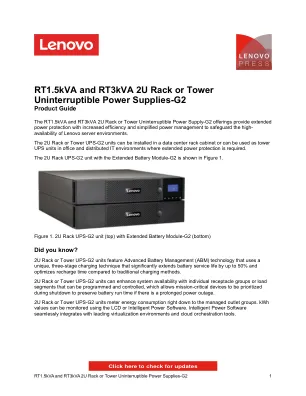
2019财年专利申请技术趋势调查(航天器)
中国空间技术研究院 (中国) 643 26,135 30 空客 (欧洲) 611 13,954 67 波音 (美国) 430 14,624 88 Energiya (俄罗斯) 430 7,401 37 三菱电机 279 89,137 20 IHI 201 13,657 28 泰雷兹 (欧洲) 153 6,495 54 三菱重工 131 27,823 16 霍尼韦尔 (美国) 117 19,431 7 雷神 (美国) 105 5,383 3 斯奈克玛 (欧洲) 102 4,363 6 太空系统/劳拉 (美国) 58 168 12 Viasat (美国) 1 685 0 蓝色起源 (美国) 12 19 1 SpaceX(美国) 1 10 9 Rocket Lab(美国) 5 5 0 北京零度空间科技公司(中国) 2 24 0 Mojave Aerospace Ventures(美国) 2 2 0 PLD space(西班牙) 0 0 0 Reaction Engines(英国) 6 13 4 Relativity Space(美国) 0 2 0 Skyrora(英国) 0 0 0 Oneweb(美国) 11 29 0 Blacksky(美国) 0 0 0 Capella Space(美国) 0 0 0 Hawkeye360(美国) 0 6 0 Iceye(芬兰) 0 1 0 OHB System(德国) 1 8 20 Planet(美国) 5 27 2 Spire Global(美国) 6 22 0 ispace(日本) 7 13 1 Planetary Resources(美国) 4 4 1 Astroscale 12 12 0 D-Orbit (意大利) 4 4 0 NASA (美国) 91 1,924 959 日本宇宙航空研究开发机构 119 500 473 国防科技大学 (中国) 69 6,274 280 哈尔滨工业大学 (中国) 338 25,237 274 加州理工学院 (美国) 19 2,648 314 韩国航空宇宙研究院 (韩国) 436 2,739 72
核融合反应堆高温超导导体开发的现状
名启博:プラマ・核融合学志92,396(2016)。[4 W.H.fietz and al。,IEEE Trans。苹果。超级。26,4800705(2016)。 [5]P。Bruzzone和Al。 ,ncle。 Fuance 58,103001(2018)。 l。米切尔和阿尔。 ,超级条件。 SCI。 树。 34,103001(2021)。 !t。安多和al。 ,技术完整。 1,791(1998)。 Lage F. Dahlgren和Al。 ,Eng已满。 甲板。 167,139(2006)。 ]H。H. Hashizume和Al。 ,Eng已满。 甲板。 63,449(2002)。 [10! Y. Ogawa和Al。 ,J。 填充完整的等离子体。 79,643(2003)。 <+11 Z. Yoshida和Al。 ,Ressing主题等离子体。 1,8(2006)。 [12 Y. Ogawa和Al。 ,Ressing主题等离子体。 9,140,014(2014)。 13 V. Corat和Al。 ,Eng已满。 甲板。 136,1597(2018)。 14 A. Sagara和Al。 ,Eng已满。 甲板。 89,2114(2014)。 15 Y. Zhai和Al。 ,Eng已满。 甲板。 135,324(2018)。 https://typeoneergy.com/ [20! Sorbon和Al。 ,Eng已满。 甲板。 100,378(2015)。 [22 A A. Sykes和Al。26,4800705(2016)。[5]P。Bruzzone和Al。,ncle。Fuance 58,103001(2018)。l。米切尔和阿尔。,超级条件。SCI。 树。 34,103001(2021)。 !t。安多和al。 ,技术完整。 1,791(1998)。 Lage F. Dahlgren和Al。 ,Eng已满。 甲板。 167,139(2006)。 ]H。H. Hashizume和Al。 ,Eng已满。 甲板。 63,449(2002)。 [10! Y. Ogawa和Al。 ,J。 填充完整的等离子体。 79,643(2003)。 <+11 Z. Yoshida和Al。 ,Ressing主题等离子体。 1,8(2006)。 [12 Y. Ogawa和Al。 ,Ressing主题等离子体。 9,140,014(2014)。 13 V. Corat和Al。 ,Eng已满。 甲板。 136,1597(2018)。 14 A. Sagara和Al。 ,Eng已满。 甲板。 89,2114(2014)。 15 Y. Zhai和Al。 ,Eng已满。 甲板。 135,324(2018)。 https://typeoneergy.com/ [20! Sorbon和Al。 ,Eng已满。 甲板。 100,378(2015)。 [22 A A. Sykes和Al。SCI。树。 34,103001(2021)。 !t。安多和al。 ,技术完整。 1,791(1998)。 Lage F. Dahlgren和Al。 ,Eng已满。 甲板。 167,139(2006)。 ]H。H. Hashizume和Al。 ,Eng已满。 甲板。 63,449(2002)。 [10! Y. Ogawa和Al。 ,J。 填充完整的等离子体。 79,643(2003)。 <+11 Z. Yoshida和Al。 ,Ressing主题等离子体。 1,8(2006)。 [12 Y. Ogawa和Al。 ,Ressing主题等离子体。 9,140,014(2014)。 13 V. Corat和Al。 ,Eng已满。 甲板。 136,1597(2018)。 14 A. Sagara和Al。 ,Eng已满。 甲板。 89,2114(2014)。 15 Y. Zhai和Al。 ,Eng已满。 甲板。 135,324(2018)。 https://typeoneergy.com/ [20! Sorbon和Al。 ,Eng已满。 甲板。 100,378(2015)。 [22 A A. Sykes和Al。树。34,103001(2021)。!t。安多和al。,技术完整。1,791(1998)。Lage F. Dahlgren和Al。,Eng已满。甲板。167,139(2006)。]H。H. Hashizume和Al。,Eng已满。甲板。63,449(2002)。[10! Y. Ogawa和Al。,J。填充完整的等离子体。79,643(2003)。<+11 Z. Yoshida和Al。,Ressing主题等离子体。1,8(2006)。[12 Y. Ogawa和Al。,Ressing主题等离子体。9,140,014(2014)。13 V. Corat和Al。,Eng已满。甲板。136,1597(2018)。14 A. Sagara和Al。 ,Eng已满。 甲板。 89,2114(2014)。 15 Y. Zhai和Al。 ,Eng已满。 甲板。 135,324(2018)。 https://typeoneergy.com/ [20! Sorbon和Al。 ,Eng已满。 甲板。 100,378(2015)。 [22 A A. Sykes和Al。14 A. Sagara和Al。,Eng已满。甲板。89,2114(2014)。 15 Y. Zhai和Al。 ,Eng已满。 甲板。 135,324(2018)。 https://typeoneergy.com/ [20! Sorbon和Al。 ,Eng已满。 甲板。 100,378(2015)。 [22 A A. Sykes和Al。89,2114(2014)。15 Y. Zhai和Al。 ,Eng已满。 甲板。 135,324(2018)。 https://typeoneergy.com/ [20! Sorbon和Al。 ,Eng已满。 甲板。 100,378(2015)。 [22 A A. Sykes和Al。15 Y. Zhai和Al。,Eng已满。甲板。135,324(2018)。https://typeoneergy.com/ [20!Sorbon和Al。,Eng已满。甲板。100,378(2015)。[22 A A. Sykes和Al。,ncle。Fusion 58,016039(2018)。<3- y。歌曲和Al。 ,Eng已满。 甲板。 183,113247(2022)。 24-24 N. Yanagi和Al。 ,Ressing主题等离子体。 9,140,013(2014)。 ,Proc。 14th Symp。 Fusion Technology,1727(1986)。歌曲和Al。,Eng已满。甲板。183,113247(2022)。24-24 N. Yanagi和Al。 ,Ressing主题等离子体。 9,140,013(2014)。 ,Proc。 14th Symp。 Fusion Technology,1727(1986)。24-24 N. Yanagi和Al。,Ressing主题等离子体。9,140,013(2014)。,Proc。 14th Symp。 Fusion Technology,1727(1986)。,Proc。14th Symp。Fusion Technology,1727(1986)。
产品规格 ReFlex IFAK SystemTM
• 采用 HANK TM(高耐磨氯丁橡胶 Kevlar ® 复合材料)抓握手柄,经久耐用 • 可垂直或水平安装在 1.5 英寸 - 2.25 英寸的皮带上,水平安装在 MOLLE 上 • 精心设计的组织功能使所有用品触手可及 • 提手和弹力绳环可将卷筒固定在患者身上或悬挂在静脉注射架上架 • 可通过侧槽取用手套,无论是否将卷筒从托架上取下 • “迷你” MOLLE 可精确安装在窄至 1.5 英寸的皮带上或两排 MOLLE 面板上 • 药卷和托架上设有环形面板,用于贴标签(包括医疗交叉贴片)
使用多架遥控飞机检测海洋水族馆环境漏油情况
其监测范围广,可进行 24 小时监控 [1]。卫星远程石油污染监测方法的发展和改进的主要方向是放弃摄影方法,转而使用新型有效载荷多光谱和高光谱传感器。如今,基于卫星的 SAR 是一种重要的石油泄漏监测工具,可全天候全天候覆盖大面积区域 [2]。尽管与其他监视系统相比具有相当大的优势,但卫星系统对同一海域的拍摄频率存在限制(频率为每 3 小时一次,考虑到改变视角的可能性)。高清无线电定位数据提供给负责机构时会有所延迟,这与向接收器的交付有关。从发生石油污染的那一刻起,基于无线电定位接收数据的地图的制作可能需要 1-2 天。在消除污染的过程中,这些情况导致需要通过移动车辆进行操作监控。

滑行道上滑行的飞机与等待点第二架静止的飞机相撞
2012 年 9 月,美国调查机构国家运输安全委员会 (NTSB) 根据 1993 年至 2012 年间调查的 12 起事故,向 FAA 和 EASA (21) 发出了两项安全建议 (20)。一架大型飞机的翼尖在滑行道上滑行时与另一架飞机或物体相撞。 NTSB 建议为所有大型飞机以及从驾驶舱不易看到翼尖的飞机安装摄像系统等防撞辅助设备,以帮助飞行员在滑行时确定翼尖路径。
RT1.5KVA和RT3KVA 2U机架或塔架不间断的电源g2
注意:联想不再提供带有M3 NMC的IPM软件,并且使用M3 NMC安装了任何7DD5 UPS单元。可以通过Eaton授权合作伙伴购买IPM许可证。要找到最近的Eaton合作伙伴,请连接到以下URL,填写表格,然后从国家下拉列表中选择您的国家。美国Web链接允许选择任何其他国家。

通过光子线粘结启用的薄膜锂硅锂上的高功率和窄线宽激光
薄膜硅锂(TFLN)已成为实现高性能芯片尺度光学系统的有前途的平台,涵盖了从光学通信到微波光子学的一系列应用。此类应用程序依赖于将多个组件集成到单个平台上。然而,尽管其中许多组件已经在TFLN平台上进行了证明,但迄今为止,该平台的主要瓶颈是存在可调,高功率和狭窄的芯片激光器的存在。在这里,我们使用光子线粘结解决了这个问题,将光学放大器与薄膜锂锂反馈电路集成在一起,并证明了扩展的腔二极管激光器,产生了78 MW的高芯片上功率,侧模式抑制较大,大于60 dB,大于43 nm的宽波长可调节性。在短时间内的激光频率稳定性显示了550 Hz的超鼻中固有线宽,而长期记录表明,光子线键合激光器的高无源稳定性具有46小时的无模式跳动操作。这项工作将光子线粘结验证为用于高性能在芯片激光器上的可行集成解决方案,为系统级别的升级和瓦特级输出功率打开了路径。
柔软却坚硬!?开发出与生物骨性质相似的金属材料
[研究背景] 在当今的超老龄化社会中,因疾病或受伤而患有骨骼和关节疾病的人数增加正在成为一个问题,对于植入体内进行治疗的生物材料的需求日益增加。金属材料具有强度与延展性优异的平衡性,且机械可靠性高,因此被广泛用作必须支撑大负荷的骨替代植入物。 植入物需要具有优异的耐磨性和耐腐蚀性。但由于它是一种高强度的金属材料,其力学性能一般与柔韧的活骨有显著差异,而且其特别高的杨氏模量是有问题的。当植入物的杨氏模量远高于骨骼时,大部分力会施加在植入物上而不是周围的骨骼上(这种现象称为应力屏蔽),这会导致骨质萎缩、骨矿物质密度降低和骨折风险增加。因此,近年来,需要开发具有与活骨相当的低杨氏模量的新型金属材料。 临床上最常用的生物医学金属材料是价格低廉的不锈钢SUS316L、耐磨性优良的CoCr合金、杨氏模量相对较低的Ti(钛)合金。然而,不锈钢和现有的钴铬合金的杨氏模量大约比活骨高10倍。虽然存在杨氏模量较低的Ti合金,但其杨氏模量高于活骨,且存在耐磨性低的问题。目前,很少有金属材料能具有与活体骨骼相当的杨氏模量,同时还具有优异的耐磨性和耐腐蚀性。特别是,低杨氏模量这一重要的机械性能通常与高耐磨性之间存在权衡关系,开发出一种兼具这些特性的新型合金一直很困难。 另一方面,在尖端医疗中使用的超弹性合金中,表现出约8%超弹性应变的NiTi(镍钛)合金的应用最为广泛。然而,NiTi合金中含有较高的Ni元素,人们担心其可能会引起过敏反应。为此,人们开发出了不含Ni的Ti基超弹性合金,但其超弹性应变仅为NiTi合金的一半左右。 【主要发现】

多架无人机系统 (UAS) 运行中的警戒和自动化依赖性:模拟研究
目标:本模拟研究调查了影响多架无人机系统 (UAS) 操作期间持续表现和疲劳的因素。本研究测试了任务完成时间和自动化可靠性对监视任务准确性和对自动化依赖性的影响。它还研究了特征和状态个体差异因素的作用。背景:Warm 的警觉资源模型在人为因素中具有很高的影响力,但需要进一步测试其对需要持续关注的复杂现实任务的适用性。多 UAS 操作不同于标准警觉范式,因为操作员必须在自动化的支持下在多个子任务之间切换注意力。方法:131 名参与者使用配置为低认知要求的多 UAS 模拟执行需要信号识别和符号计数的监视任务,持续 2 小时。在组间操纵自动化可靠性。在执行之前测量五因素模型人格特质。使用邓迪压力状态问卷评估主观状态。结果:在更苛刻的监视任务上的表现准确性显示警惕性下降,尤其是在自动化可靠性较低的情况下。对该任务的自动化依赖性随着时间的推移而下降。状态因素而非特质因素可以预测绩效。在更苛刻的任务条件下,高痛苦与较差的表现有关。结论:警惕性下降可能是多 UAS 监视任务的操作问题。Warm 的资源理论可能需要修改,以纳入与低工作量、疲劳环境中的多任务处理相关的信息处理和任务策略的变化。应用:多 UAS 操作的界面设计和操作员评估应解决包括动机、压力和对自动化的持续关注等问题。

新型“H”型音叉匙架雷达 - Mil-Exim 有限公司
基于巴尔干战争的经验和研究,1990 年代末匈牙利空军启动了 P18 H diapason“勺架”型雷达站的现代化改造计划。主要目的一方面在于这种雷达在战争期间非常成功地执行了监视任务。它是唯一能够识别和探测“隐形”飞机的雷达。另一方面,与其他雷达相比,这种雷达的维护成本非常低。通过现代化改造,成本降低了 50% 以上。P-18 现代化改造的结果是,现代化设备必须具备以下战术和技术参数:它拥有基于高功率元件的全固态发射机系统。接收器和操作员工作站基于最新一代微芯片。电子系统基于 21 世纪的要求。它具有完全军用设计,可在 -40C 至 +85C 的温度下工作。从技术方案和参数上看,这是目前国际市场上最好的勺架式雷达产品之一。A) 战术参数(主要取决于客户的要求)