XiaoMi-AI文件搜索系统
World File Search System栅格

用于远距离检测和跟踪的扫描激光雷达......
摘要:在过去的几年中,滥用民用无人机或无人机(无人驾驶飞机)一直是一个令人关注的问题。作为响应,已经开发了多个系统,包括光学,电子甚至声学技术,以进行检测和跟踪。不幸的是,由于其小小的,十分尺寸的大小以及形状和行为的巨大变化,无人机代表了一个具有挑战性的目标。在该博士学位上,我们开发了一种激光雷达(光检测和范围)系统,以解决此问题以拆除一公里处。在我们的系统中,范围是使用ight原理的时间来获取的,并通过使用双轴电量器依次扫描场景来完成图像。我们利用扫描多功能性开发了多种操作模式。标准检测模式使用大量视图的栅格扫描捕获场景的图像。跟踪模式基于围绕目标的本地模式,该模式以非常高的速率更新,以使目标保持在其边界内。e Ort被纳入了我们扫描激增的众多参数的理论和数值优化研究中,以便在最大范围,本地化分辨率和速率方面达到表现性能。用于检测和跟踪模式的模式优化是主要焦点,使用检测的目标概率作为最大化的函数。目标大小,速度和替代性也引入了检测的概率,从而完整概述了系统性能。该原型在几周的试验中测试了无人机检测和跟踪。在我们的LiDAR平台上,从头开始开发,每个组件的表征都可以丰富和验证我们的模型。成功之后,候选人启动和监督了工业前的整合过程。

使用 WINGTRAONE 垂直起降尾翼对村庄进行 3D 测绘
摘要。如今,许多摄影测量测绘方法都使用无人机来检索和记录有关地球上物体的数据。这是因为与租用飞机相比,使用配备 GNSS(全球导航卫星系统)的无人机进行测量非常高效且更便宜,它还可以飞越难以到达的区域并大大缩短时间。罗马尼亚的无人机技术发展仍处于起步阶段,立法框架甚至对小型无人机也施加了一定的限制。因此,为了使用飞机,需要获得罗马尼亚民航局的批准,以及国防部的批准。这样,飞行在距离、高度和面积方面都受到管制。该研究的目的是实现并详细说明通过摄影测量技术(UAS/UAV)生成正射影像图和三维模型的工作流程,这些工作流程可用于各种地形地籍工作或作为叠加分析的主要地理空间数据,用于城市化、农业、空间规划、地貌学等其他各个领域。本文介绍了使用无人机摄影测量数据对阿拉德县 Labaşinţ 地区进行测绘的结果,使用 WingtraOne VTOL 尾随无人机,配备索尼 RX1RII 相机,配备 42.4 兆像素 CMOS 传感器、35 毫米、全画幅和 GNSS 系统。高精度。数据处理的最后阶段包括生成正射影像平面、马赛克、栅格图像、TIN 和 DEM 格式以及生成点云。目前,无人机在地理空间科学领域的应用需求很高,因为与卫星系统相比,无人机操作相对简单,成本相对低廉,尤其是高分辨率图像。使用无人机的好处之一是,它们可以拍摄航空照片,然后对其进行处理以进行测绘,从而可用于支持空间数据的获取。关键词:WingtraOne、Pix4Dmapper、DEM、DTM、DSM、Labasint、领土分析。
使用 WINGTRAONE 垂直起降尾翼对村庄进行 3D 测绘
摘要。如今,许多摄影测量测绘方法都使用无人机来检索和记录有关地球上物体的数据。这是因为使用配备 GNSS(全球导航卫星系统)的无人机进行测量比租用飞机非常高效且更便宜,它还可以飞越难以到达的区域并大大缩短时间。罗马尼亚的无人机技术发展仍处于起步阶段,立法框架甚至对小型无人机也施加了某些限制。因此,为了使用该飞机,需要获得罗马尼亚民航局的批准,以及国防部的批准。通过这种方式,飞行在距离、高度和面积方面受到监管。本研究的目的是实现和技术详述通过摄影测量技术(UAS/UAV)生成正射影像图和三维模型的工作流程,这些工作流程可用于各种地形地籍工作或作为叠加分析的主要地理空间数据,用于其他各个领域:城市化、农业、空间规划、地貌学等。本文介绍了无人机摄影测量数据在阿拉德县 Labaşinţ 地区测绘中的应用结果,使用 WingtraOne VTOL 尾随无人机,配备索尼 RX1RII 相机,配备 42.4 兆像素 CMOS 传感器、35 毫米、全画幅和 GNSS 系统。精度高。数据处理的最后阶段包括生成正射影像平面、马赛克、栅格图像、TIN 和 DEM 格式以及生成点云。目前,无人机在空间科学领域的应用需求很高,因为与卫星系统相比,无人机操作相对简单,成本相对低廉,尤其是高分辨率图像。使用无人机的好处之一是,它们可以拍摄航空照片,然后对其进行处理以进行测绘,从而可用于支持空间数据的获取。关键词:WingtraOne、Pix4Dmapper、DEM、DTM、DSM、Labasint、领土分析。
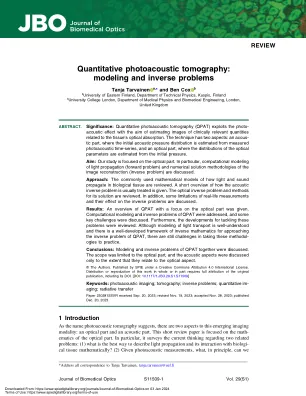
定量光声断层扫描:建模和反问题
1.1光声成像,有一些密切相关但不同的成像方式在光声成像的标题下。所有人都利用光声效应,这是当充分短的光脉冲被弹性材料吸收并随后被热化时,吸收位点将充当声脉冲的来源。1 - 3中,在所有变体中,光脉冲都针对正在研究的软生物组织,并在组织表面测量所得的声脉冲。从声脉冲的测量值中,可以形成吸收光的图像。这是光声图像。光声显微镜与光声断层扫描的不同之类的方式不同,以收集数据并形成图像。在光学显微镜中,光束或声学探测器都被牢固地聚焦并横跨组织表面扫描。1,4由于焦点引起的定位,可以直接从测量的声学时间序列中形成图像。确实,正是聚焦的紧密性决定了图像的分辨率。(源或检测器通常是栅格扫描的事实不是使显微镜的原因;一系列集中的来源或检测器也可以使用。)是释放的 - 实际上,照明的布置使整个利益区域充满光 - 并且一系列未加注(或至少不是紧密的集中)探测器可用于记录产生的声学时间序列。1,2因为光声源可以分布在整个组织中,并且每个时间序列都可以包含来自任何地方的信号(因为检测器没有重点),因此与显微镜相比,数据和源之间的连接更为复杂,并且必须使用图像重建算法来形成图像。光声断层扫描,而不是显微镜,是本综述的主要关注点,尽管所述的组织光学功能将适用于浊度介质中的所有光声成像方法。

定量光声断层扫描:建模和反问题
1.1光声成像,有一些密切相关但不同的成像方式在光声成像的标题下。所有人都利用光声效应,这是当充分短的光脉冲被弹性材料吸收并随后被热化时,吸收位点将充当声脉冲的来源。1 - 3中,在所有变体中,光脉冲都针对正在研究的软生物组织,并在组织表面测量所得的声脉冲。从声脉冲的测量值中,可以形成吸收光的图像。这是光声图像。光声显微镜与光声断层扫描的不同之类的方式不同,以收集数据并形成图像。在光学显微镜中,光束或声学探测器都被牢固地聚焦并横跨组织表面扫描。1,4由于焦点引起的定位,可以直接从测量的声学时间序列中形成图像。确实,正是聚焦的紧密性决定了图像的分辨率。(源或检测器通常是栅格扫描的事实不是使显微镜的原因;一系列集中的来源或检测器也可以使用。)是释放的 - 实际上,照明的布置使整个利益区域充满光 - 并且一系列未加注(或至少不是紧密的集中)探测器可用于记录产生的声学时间序列。1,2因为光声源可以分布在整个组织中,并且每个时间序列都可以包含来自任何地方的信号(因为检测器没有重点),因此与显微镜相比,数据和源之间的连接更为复杂,并且必须使用图像重建算法来形成图像。光声断层扫描,而不是显微镜,是本综述的主要关注点,尽管所述的组织光学功能将适用于浊度介质中的所有光声成像方法。

CMIP6浓度和智利的温度投影
在智利的气候下评估了耦合模型间比较项目6(CMIP6)下36个新状态的合奏 - 艺术气候模型的抽象降水和近表面温度。分析集中在四个不同的气候子区域:北智利北部,智利中部,巴塔哥尼亚北部和巴塔哥尼亚南部。在每个子区域上,首先,我们评估了整个全球气候模型(GCM)的性能,以在历史时期(1986- 2014年)(1986- 2014年)中的降水和温度观测的栅格数据集,然后分析模型的预测,即对于四个不同的共享社会经济路径(2080-2099)(2080-2099)(2080-2099)。尽管模型的特征是一般湿和温暖的平均偏见,但它们实际上是不同子区域的主要时空气候变异性。但是,对于降水和温度,所有模型均不是所有子区域中最好的。是根据泰勒技能得分定义的最佳性能模型,人们发现所谓的“热模型”可能表现出高估的气候灵敏度,这表明使用这些模型来访问智利未来的气候变化时要谨慎。我们发现,在变化方向上有强大的(90%的模型在变化方向上达成共识)预计中央智利平均降水量减少(〜-20至〜-40%)和北部的巴塔哥尼亚北部(〜-10至10至〜-30%)(〜- 10至〜-30%),在情景SSP585下,在SPSSP245上的变化在SPSSP245上的变化很大。北部智利和南部巴塔哥尼亚南部显示了整个模型中降水的不变变化。然而,未来的近表面温度变暖呈现了整个子区域的高模块间一致性,其中最大的增量发生在安第斯山脉沿线。北部智利在SSP585中显示出最大〜6°C的最大增量,然后是中央智利(最高〜5°C)。北部和南部的巴塔哥尼亚均显示出相应的增量,高达〜4°C。我们还简要讨论了这些未来变化对智利的环境和社会经济含义。

使气候重新分析和CMIP6数据处理简易
气候重新分析和气候投影数据集为研究人员,学生和讲师提供了潜力,可以从20世纪后半叶获得物理知识,全球,时间和空间连续的气候数据,并探索不同的潜在潜在未来气候。尽管这些数据在生物学,环境和社会科学中都具有重要用途,但潜在用户通常会面临处理和访问没有专业知识,设施或帮助的处理和访问无法克服的数据的障碍。因此,在研究和教育社区中,气候重新分析和投射数据目前已实质上不足。为了解决这个问题,我们提出了两个简单的“点击点击”图形用户界面:Google Earth Engine气候工具(Geeclimate),可访问气候重新分析数据产品;和Google Earth Engine CMIP6 Explorer(GeeCe),允许处理和提取CMIP6投影数据,包括创建自定义模型集合的能力。Geeclimt和Geece一起提供了可轻松访问387多个数据的数据,这些数据可以在常用的电子表格(CSV)或栅格(Geotiff)格式中输出,以帮助随后进行平地分析。两个工具中包含的数据包括:20种大气,陆地和海洋重新分析数据产品;根据1950 - 2022年ERA5-Land数据计算出的年度分辨率气候变量(与WorldCLIM相当)的新数据集; 34个模型模拟,SSP2-4.5和SSP5-8.5方案的34个模型模拟的CMIP6气候投影输出。还提供了使用两种工具数据的五个案例研究。新数据产品也可以轻松地添加到工具中,因为它们在Google Earth Engine数据目录中可用。这些表明Geeclimt和Geece是易于扩展的工具,可以删除多个进入的障碍,可以将气候重新分析和投影数据打开到新范围更广泛的用户。

研究3D打印参数对... -dr -ntu
摘要:本文旨在确定3D打印参数的影响,例如填充密度,挤出温度,栅格角度和层厚度,对机械性能,即在果酸酸(PLA)的情况下,即在破裂的情况下,即在破裂的情况下,即最终的拉伸强度,屈服强度,弹性和伸长率。另一个目的是研究PLA的吸水,其目标是通过涂层剂最小化。使用方差分析(ANOVA)评估每个印刷参数对每个机械性能的影响。关键字:( 3D打印,PLA,机械性能,吸水,打印参数)近年来,3D打印机的使用量显着增加,并且可以预期这种趋势的延续。3D打印机现在通常用于制造各种产品,范围从休闲物品到医疗组件(Gibson等人2015a)。从所有3D打印技术中,由于大量开发和销售这种打印机及其相对低成本的公司,公众更容易获得的公众访问的技术(FDM)(Gibson等人。2015b)。为了使用FDM技术打印对象,需要定义一定数量的打印参数。由于最终产品的质量受这些参数的大多数影响,因此知道其中哪种是最有影响力的(Sood等人。2012; Anitha等。2001; Wang等。 2007; Tymrak等。 2015)。2001; Wang等。2007; Tymrak等。 2015)。2007; Tymrak等。2015)。2014; Lanzotti等。2015a; Wittbrodt等。研究人员使用了实验方法的设计(DOE),以计划实验室工作,以使结果值得信赖。DOE中有三个主要方面:因素,水平和响应。设计矩阵,这些是具有不同因素之间所有级别组合的表(Anderson等人。2016; Lanzotti等。2015a)。作为FDM定向沉积的材料,结果是具有各向异性行为的分层标本。,由于过程的方法,空气口袋形式,会影响机械性能

人为气候变化影响了全球河流流量季节性
基于材料和方法观察数据集1月1个月度流动时间序列(根据每日记录计算)是从2个全球流量指数和元数据存档(GSIM)获得的(18,47)。全球径流数据3中心(48)(GRDC)数据库,以每月规模提供河流流量,该数据库被4 GSIM排除,用作补充数据集。要计算具有最小偏差的RF,制定了两个5个选择标准:i)研究期限从1965年到2014年,以确保6个足够的站点进行空间覆盖范围的足够分析; ii)每月排放量仅在每年8个月可用10个月或更长时间的数据时才能计算年度季节性指数。鉴于气候迅速变化,我们通过将五个定期更新的河流流量数据集(表S3)从国民到2017 - 2019年全球水平结合在一起,扩展了分析,以包括最近的9年。拥有国家或11个大陆数据库的国家/地区的所有GRDC站(例如USGS数据)被替换,以避免重复的时间12系列河流。13为了获得全球范围的覆盖范围,使用了最近发表的全球栅格每月14个径流(Grun)数据集的重建(19)。Grun是从GSIM的原地15个月度河流流量观测到的,其空间分辨率为0.5°,涵盖了1902年至2014年的16个时期(19)。它是通过训练基于全球土壤湿度的降水和温度观察的机器学习算法的17阶段(GSWP3)数据集(19)的训练,因此,Grun无法明确考虑19的效果。S17)。观察到来自GRDC数据集的每月河流排放,并从部门间影响模型对比21项目(ISIMIP2A)重建的2A阶段的20个多模型模拟用于验证(19)。在新出版的G-Run合奏中的另外四个成员22在1965 - 2014年重叠,用来23个说明了径流上大气强迫数据集的不确定性,包括径流24次被CRUTSV4.04,GSWP3-W5E5,GSW3-W5E5,GSWP3-EEMBI和PGFFV3 25(49)强迫。与G-Run合奏的AE趋势的空间模式与Grun 26支持使用Grun进行气候变化检测和归因分析,而27进一步证实了我们结果的鲁棒性(图总而言之,原位观察结果28结合了气候变化的影响(包括ACC,自然强迫和自然29气候变化)和人类活动(例如储层,人类水管理和30种土地利用变化,缩写为HWLU)。相反,Grun和G-Run Ensemble仅31个说明了气候变化的影响。为了排除储层对原位观测值的RFS趋势的空间32模式的影响,水合物subbasin单元(PFAFSTETETER 33级别12)(50)与Grill等人提供的调节程度(DOR)集成在一起。(51)至34个将量规站区分为受储层影响(DOR> 0)的量规站,以及由储层(dor = 0)受到影响的35个。subbasin单位水平的DOR通过在河流范围内选择DOR的36个最大值来表示。使用了1965年至2014年期间的5×5°分辨率的crutem5数据集的平均空气温度数据(55)。有6,150个站点从储层影响中确定为37个,而3,914个站位于sibbasins或38个水库的下游(有49个车站由于在39个岛屿上的存在,而另外7个缺乏DOR信息的车站,因此位于水力发生范围外的49个站点)。在1979 - 2000年的平均降雪与降水量41的比例(52)时,全球范围内的40个降雪区域(52)都在全球范围内确定,其中包含0.5°的全球42降水量和降雪通量。2014年降雪时间序列的时间序列是根据全日制44覆盖率的第五代大气再分析(ERA5)计算得出的(53)。为排除降水季节性,观察到的每月栅格降水45来自全球降水气候中心(GPCC)(54)的数据以2.5×46 2.5°的分辨率在1965-2014时以每月量表为单位。48
NASA 电子零件和包装 (NEPP) 计划
缩写 定义 缩写 定义 AF 空军 NASA 美国国家航空航天局 BGA 球栅阵列 NEPAG NASA 电子零件保证组 BN 贝叶斯网络 NEPP NASA 电子零件和包装(程序) BoK 知识体系 NESC NASA 工程和安全中心 CMOS 互补金属氧化物半导体 NODIS NASA 在线指令信息系统 COTS 商用现货 NPR NASA 程序要求 CPU 中央处理单元 NRO 国家侦察办公室 DDR 双倍数据速率 NSREC 核与空间辐射效应会议 DLA 国防后勤局 OCE 总工程师办公室 DMEA 国防微电子活动 OGA 其他政府机构 DoD 国防部 PIC 光子集成电路 DoE 能源部 POC 联系点 EEE 电气、电子和机电 PoF 故障物理学 ETW 电子技术研讨会 RF 射频 FPGA 现场可编程门阵列 RH 抗辐射 GaN 氮化镓 RHA 抗辐射保证 GIDEP 政府工业数据交换计划 SAPP 空间资产保护计划 GPU 图形处理单元 SDRAM 同步动态随机存取存储器 GRC 格伦研究中心 SEE 单事件效应 GSFC 戈达德太空飞行中心 SiC 碳化硅 GSN 目标结构化符号 SMA 安全与任务保障 HQ 总部 SMC 空间与导弹系统中心 IC 集成电路 SOA 安全操作区 IEEE 电气和电子工程师协会 SoC 片上系统 JPL 喷气推进实验室 SRAM 静态随机存取存储器 JSC 约翰逊航天中心 SSAI 科学系统与应用公司 LaRC 兰利研究中心 STMD 空间技术任务理事会 LGA 陆地栅格阵列 STT 自旋转移力矩 MAPLD 军用和航空航天可编程逻辑器件(研讨会) SysML 系统建模语言 MBMA 基于模型的任务保障 TID 总电离剂量 MRAM 磁性随机存取存储器 TSV 硅通孔 MSFC 马歇尔太空飞行中心