XiaoMi-AI文件搜索系统
World File Search System模块化的

不确定性吸引模块化的设计和分析...
我们提出了不确定性感知的模块化自治堆栈的框架,以描述利用不确定性定量(UQ)的现代机器人系统。在论文的第一部分中,我们引入了导航框架的实现。我们提出了一条新型管道,以从使用保形预测的轨迹预测模型以及一种利用这些集合的安全保证的计划方法中获得概率安全且可行的可行性集合。我们通过实际的自动驾驶数据以及波音车辆的实验来展示管道在仿真中的功效。在第二部分中,我们通过研究使用UQ的系统范围的影响,对框架进行了分析。我们使用级别设置估计工具来有效地量化系统的鲁棒性和校准,即使评估过程成本很高。我们将分析应用于两个现实的行业级系统。我们发现,在存在输入误差的情况下,UQ改善了整体系统的鲁棒性,尽管上游的错误输出错误,但UQ使下游模块能够提供校准的输出。
轻巧和模块化的设计,控制和试点研究...
spinal cord injury Josep M. Font-Llagunes 1 Biomechanical Engineering Lab, Department of Mechanical Engineering and Research Centre for Biomedical Engineering, Universitat Politècnica de Catalunya, Diagonal 647, 08028 Barcelona, Spain josep.m.font@upc.edu Urbano Lugrís Laboratory of Mechanical Engineering, University of La Coruña, MendizábalS/N,15403 FERROL,西班牙ulugris@udc.es daniel Clos Clos Biomegaronical Engineering Lab,机械工程与生物医学工程研究中心,Catalunya Universitatate politiatiatial.clos.clos.clos and Spain andiality formitial.clos.clos.clos and spo.clos和Extremadura大学工程,AVDA。de elvas s/n,06006 Badajoz,西班牙fjas@unex.es javier cuadrado实验室,机械工程实验室,LaCoruña大学,Mendizábals/n,15403 Ferrol,西班牙javier.cuadrado.cuadrado@udc.es@udc.es@udc.es@udc.es

一个模块化的DNA组件作为miRNA抑制剂
图3。miRNA储物柜的miRNA抑制作用的验证。(a)示意图表示miR-214对癌细胞EMT过程的影响。两个miRNA储物柜LC-1和LC-2有望通过阻止miR-214对EMT促进蛋白的RNF8的抑制作用来促进EMT。(b)IP-PCR分析确定miRNA储物储物在A549细胞中与靶microRNA的结合能力。启动设计的示意图表示,Hago2代表了表达质粒的标志标记的人AGO2,输入表示总DNA的等分试样。用于免疫沉淀的抗体在泳道上方指示。(c)RT-QPCR结果证明了用miR-214储物柜LC-C(作为对照)/LC-1/LC-1/LC-2或miR-214 Antagomir(AN-214)/Antagomir对照(ANANTAGOMIR对照)转染的A549细胞中miR-214的丰度。(d)用miR-214储物柜LC-C/LC-1/LC-2或Antagomir AN-214/AN-C转染的A549细胞中RNF8表达水平的蛋白质印迹。 (e)用miR-214储物柜LC-C/LC-1/LC-2或Antagomir AN-214/AN-C转染的A549细胞中迁移的Transwell分析。 (F)CCK8分析表明用miR-214储物柜LC-C/LC-1/LC-2转染的A549细胞的增殖。使用2-ΔΔCT方法计算了相对基因表达,并在每组内针对U6 snRNA的基因初始归一化。对照组(LC-C或AN-C)中每个基因的表达水平
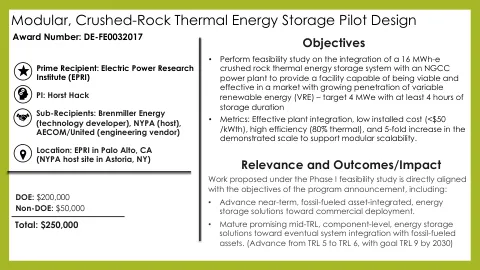
模块化的,压碎的摇滚热储能飞行员设计
2)NETL在低碳未来时需要考虑什么?VRE来源的持续增长挑战了电力传输和分配系统的稳定运行。增加储能以提高化石生成资产的灵活性可以帮助应对这一挑战。提高的灵活性可以支持VRE源整合的进一步增长,同时保持电网的稳定性和备份储备。可扩展的碎石TES为NGCC和其他化石生成资产提供了直接应用的机会,这些资产将受益于由于VRE而增加的灵活性,并且在广泛的植物尺寸上。

一种稳健且模块化的多传感器融合方法应用...
摘要 — 人们早已知道,融合来自多个传感器的信息用于机器人导航可以提高稳健性和准确性。然而,在现场部署之前对传感器组合进行精确校准以及应对传感器中断、不同的测量速率和延迟,使多传感器融合成为一项挑战。因此,大多数情况下,系统不会为了简单而利用所有可用的传感器信息。例如,在需要机器人从室内过渡到室外的任务中,通常会忽略一旦在室外就可以免费获得的全球定位系统 (GPS) 信号,而是仅依靠在整个任务期间持续可用的传感器馈送(例如,视觉和激光)。当然,这是以牺牲实际部署中的稳健性和准确性为代价的。本文提出了一个通用框架,称为多传感器融合扩展卡尔曼滤波器 (MSF-EKF),能够处理来自理论上无限数量的不同传感器和传感器类型的延迟、相对和绝对测量,同时允许在线对传感器套件进行自我校准。MSF-EKF 的模块化允许在操作期间无缝处理额外/丢失的传感器信号,同时采用状态缓冲方案并增强迭代 EKF (IEKF) 更新,以允许有效地重新线性化预测,以接近绝对和相对状态更新的最佳线性化点。我们使用配备 GPS 接收器以及视觉、惯性和压力传感器的微型飞行器 (MAV) 在户外导航实验中展示了我们的方法。

催产素增强的基于模块化的孤独感:概念验证随机对照试验
德国波恩大学医学院的精神病学和心理治疗系; B德国奥尔登堡大学医学与健康科学学院精神病学系; C以色列海法海法大学心理学系; D鲁尔大学伯丘姆(Bochum)的心理学学院,德国博丘姆(Bochum); E德国心理健康中心(DZPG),德国Bochum; F德国弗雷堡大学医学院医学中心医学中心精神病学和心理治疗系;德国波恩的波恩大学经济学和神经科学中心; h德国波恩大学医学院实验性癫痫学和认知研究所;我的医学心理学部门,精神病学和心理治疗系,德国波恩大学医学学院; J Ruhr University Bochum,Bochum,德国Bochum的医学学院社会神经科学系; K研究中心的一名健康鲁尔大学联盟鲁尔,鲁尔大学,德国博丘姆大学

模块化的微型机器人,具有锁定模块,用于胆管
磁性微型机器人有望在最低侵入性细胞的治疗中受益。但是,它们通常会遭受其磁反应能力和生物医学功能之间必然的折衷。在此,我们报告了一个模块化的微型机器人,该微型机器人由磁性致动(MA)和细胞支架(CS)模块组成。具有强磁性和pH响应性变形的MA模块以及具有细胞加载功能的CS模块是通过三维打印技术制造的。随后,通过设计轴孔结构并自定义其相对尺寸来执行模块的组装,从而在复杂的环境中启用了磁导航,同时又不降低细胞功能。在目标病变处的按需拆卸,以促进CS模块的输送和MA模块的检索。此外,在体内兔胆管中验证了拟议系统的可行性。因此,这项工作提出了一种基于模块化设计的策略,该策略能够毫不妥协地制造手动型微型机器人,并刺激其发育以用于将来的基于细胞的治疗。

Lucientry:一个基于模块化的实验室的清晰梦想感应原型
Lucid Dreaming是一种独特的意识状态,而在梦想者可以进行自愿行动的睡眠中,不受身体世界的限制并控制他们的梦想的限制,提供了各种心理和身体健康的好处。当前的研究结合了多个清醒的梦想诱导技术,通常是在实验室环境中进行的,由于依靠研究人员手动监控而缺乏自主权。最近的研究还主张一个模块化系统,该系统可以整合多个清醒的梦想诱导技术。我们提出了Lucientry,它是一个包括移动应用程序的原型,该应用程序可指导用户进行睡眠前的认知训练以及一个评估用户睡眠阶段并触发外部刺激的系统,从而自动诱导Lucid Dreams。我们希望这个模块化自主系统能够改善研究过程,并有助于进一步研究清醒梦。

模块化的营养结构改变了通过海洋食品网的能量流
食品网络互动控制生态系统如何应对气候变化和生物多样性丧失。模块化,其中物种的亚组与亚组外的物种相比,彼此相互作用的频率更高,它是与食物网稳定性相关的关键结构特征。我们试图通过比较四个高度解决的海洋食品网的结构来解决对生态系统之间如何变化的模块化,并使用模拟的退火算法来识别网络模块和随机森林模型,以预测基于八个功能特征集的模块的物种分布。两个离岸网络中的模块在很大程度上是通过营养水平分配的,在它们之间产生了相互依存,而两个半封闭式海湾中的模块通常分为具有较少的营养分离和包含独特的基础资源的能量通道,从而在能源通过网络中提供了更大的基础资源。觅食栖息地和流动性预测了所有网络中的模块成员资格,而体重和觅食策略也分别区分了海上和海湾生态系统的模块。环境异质性可能是推动模块化差异的关键因素,以及功能性状在预测模块构件中的相对重要性。我们的结果表明,除了整体网络模块化外,在推断有关生态系统稳定性时,还应考虑食物网中模块的营养结构。

自动移动系统的基于端到端的深钢筋学习基于模块化的任务分配框架
摘要 - 可以解决任务分配问题的智能决策系统对于多机器人系统以协作和自动化的方式进行工业应用至关重要,例如使用移动机器人使用移动机器人,使用无人体表面工具进行的水力调查等仓库检查等。因此,本文旨在解决多代理自动移动系统的任务分配问题,以自主,智能地将多个任务分配给机器人机器人。这种问题通常被视为与成员机器人以下任务计划分离的独立决策过程。为了避免由脱钩引起的亚最佳分配,提出了一个端到端任务分配框架,以解决此组合优化问题,同时在优化过程中考虑了后续的任务计划。该问题被称为多人多epter travely Salesmen问题(MTSP)的特殊变体。提议的端到端任务分配框架采用了深厚的强化学习方法来代替以前工作中使用的手工启发式方法。所提出的框架具有加固学习代理的模块化设计,可以针对各种应用程序进行自定义。此外,提出了基于机器人操作系统2的实体机器人实现设置,以实现仿真到现实差距。执行了仓库检查任务,以验证拟议框架的训练结果。该框架已通过模拟和实体机器人测试与各种参数设置进行了交叉验证,其中适应性和性能得到了很好的证明。