XiaoMi-AI文件搜索系统
World File Search System模拟系统

使用环境了解非马克维亚开放量子系统
在模拟开放量子系统时,追踪自由度是必要的程序。是推导可拖动的主方程的重要步骤,它代表了信息丢失。在系统之间存在强烈相互作用的情况下,自由群体的环境程度这一损失使得理解动态具有挑战性。这些动力学在孤立的情况下没有时间 - 局部描述:它们是非马克维亚语和记忆效应的诱导复杂的效果,这些复杂效果很难解释。为了解决这个问题,我们在这里展示了如何使用任何方法计算的系统相关性来推断高斯环境的任何相关函数,只要系统与环境之间的耦合是线性的。这不仅允许重新构建系统和环境的全部动力,而且还可以为研究系统对环境的影响而开放。为了实现准确的浴缸动力学,我们利用了模拟系统动力学的数值精确方法,该方法基于代表该开放量子系统的过程张量的张量网络的构建和收缩和收缩。使用此功能,我们能够准确地找到任何系统相关功能。为了证明我们方法的适用性,我们显示了当耦合到受阳性驱动器的两级系统时,热量如何在波音浴的不同模式之间移动。

基于 FPGA 的安全相关 PRM 系统的认证
基于 FPGA 的安全相关 PRM 系统的认证 Tadashi Miyazaki、Naotaka Oda、Yasushi Goto、Toshifumi Hayashi 东芝公司,日本横滨 摘要。东芝开发了基于不可重写 (NRW) 现场可编程门阵列 (FPGA) 的安全相关仪器和控制 (I&C) 系统。考虑到应用于安全相关系统,东芝基于 FPGA 的系统采用了一旦制造就无法更改的非易失性和不可重写的 FPGA。FPGA 是一种仅由基本逻辑电路组成的设备,FPGA 执行通过连接 FPGA 内部的基本逻辑电路配置的定义处理。基于 FPGA 的系统解决了传统模拟电路系统(模拟系统)和中央处理器系统(CPU 系统)中存在的问题。应用 FPGA 的优势在于可以保持产品的长寿命供应、提高可测试性(验证)以及减少模拟系统中可能出现的漂移。东芝此次开发的系统是功率范围中子监测器 (PRM)。东芝计划从现在开始将这一开发流程应用于其他安全相关系统(如 RPS),从而扩大基于 FPGA 的技术的应用范围。东芝为基于 NRW-FPGA 的安全相关 I&C 系统开发了一种特殊的设计流程。该设计流程解决了多年来关于核安全应用数字系统可测试性的问题。因此,基于东芝 NRW-FPGA 的安全相关 I&C 系统具有成为核安全应用数字系统标准的巨大优势。1.简介 核电站 I&C 系统最初是基于模拟的。1980 和 90 年代开发了基于计算机的 I&C 系统。特别是,先进沸水反应堆 (ABWR) 中使用的系统是世界上第一个用于沸水反应堆的全数字 I&C 系统。与旧的基于模拟的系统相比,基于计算机的 I&C 系统具有许多优势。基于计算机的 I&C 系统没有漂移问题,这些问题困扰了基于模拟的系统维护人员。基于计算机的 I&C 系统具有许多高级功能,包括一些自动功能,这是任何基于模拟的系统都无法提供的。基于计算机的 I&C 系统的这些高级功能一直有助于核电站的安全运行。由于基于计算机的 I&C 系统与安全相关,因此它们需要遵守法规和标准的 V&V。然而,丰富的功能和由此产生的软件复杂性使基于计算机的 I&C 系统的 V&V 既耗时又昂贵。此外,基于计算机的系统使用半导体工业生产的微处理器,与核工业相比,其产品生命周期更短。大多数微处理器可能在几年内就过时了。FPGA 在半导体工业中发展到 1990 年。与普通半导体器件或专用集成电路 (ASIC) 不同,FPGA 中的电路可以在从半导体代工厂发货后确定或编程。因此,它适用于核工业等小批量应用。因为 FPGA 是一种半导体器件,其功能由嵌入在器件中的电路决定,所以 FPGA 不需要基于计算机的 I&C 系统所必需的操作系统 (OS) 或复杂应用程序即可运行。一般而言,基于 FPGA 的 I&C 系统比基于计算机的 I&C 系统更简单,这使得 V&V 工作更简单且更经济实惠。
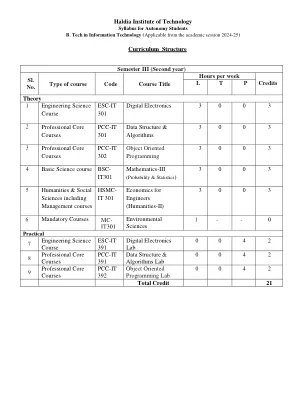
课程结构
1. IGNagrath,《模拟电子学》,PHI 2. 《模拟电子学》,AK Maini,Khanna 出版社 3. 《微电子工程》——Sedra 和 Smith-Oxford。 4. 《电子设备和电路原理》——BL Thereja 和 Sedha——S Chand 5. 《数字电子学》——Kharate——Oxford 6. 《数字电子学——逻辑和系统》,J.Bigmell 和 R.Donovan 编著;Cambridge Learning。 7. 数字逻辑和状态机设计(第 3 版)– DJComer,OUP 8. 电子设备与电路理论 – Boyelstad & Nashelsky - PHI 9. Bell-Linear IC & OP AMP—Oxford 10. P.Raja- 数字电子学- Scitech Publications 11. Morries Mano- 数字逻辑设计- PHI 12. RPJain—现代数字电子学,2/e,McGraw Hill 13. H.Taub & D.Shilling,数字集成电子学- McGraw Hill。14. D.RayChaudhuri- 数字电路-Vol-I & II,2/e- Platinum Publishers 15. Tocci,Widmer,Moss- 数字系统,9/e- Pearson 16. J.Bignell & R.Donovan- 数字电子学-5/e- Cenage Learning。 17. Leach & Malvino—数字原理与应用,第 5 版,McGraw Hill 18. Floyed & Jain- 数字基础-Pearson。课程成果:ESC 301.1 定义基本模拟电路,例如放大器、Wein 桥振荡器、多谐振荡器、Schimtt 触发器和 555 定时器。ESC 301.2 使用二进制数字系统和布尔代数的基础知识区分模拟系统和数字系统。
EDEN:高性能、通用、NeuroML...
现代神经科学在不断增加和更详细的神经网络上采用计算机模拟实验。高建模细节与高模型可重复性、可重用性和透明度的需求密切相关。此外,模型的大小和研究中的长时间尺度要求使用具有高计算性能的模拟系统,以提供可接受的结果时间。在这项工作中,我们提出了 EDEN(网络可扩展动态引擎),这是一种新的通用、基于 NeuroML 的神经模拟器,通过创新的模型分析和代码生成技术实现了高模型灵活性和高计算性能。该模拟器直接运行 NeuroML-v2 模型,无需用户学习另一种特定于模拟器的模型规范语言。EDEN 的功能正确性和计算性能通过 NeuroML-DB 和开源大脑模型存储库中提供的 NeuroML 模型进行评估。在定性实验中,EDEN 生成的结果针对各种模型与现有的 NEURON 模拟器进行了验证。同时,计算性能基准测试表明,EDEN 的运行速度比典型台式计算机上的 NEURON 快一到两个数量级,而且无需用户付出额外努力。最后,无需用户付出额外努力,EDEN 已从头开始构建,可在多个 CPU 和计算机集群(如果可用)上无缝扩展。

神经发动机:基于硬件的事件驱动模拟...
大脑启发的计算旨在了解大脑的机制,并重现其计算能力,以推动计算机科学领域的各个领域。深度学习是一个成功的例子,可以通过利用简化的人工神经网络(ANN)来大大改善模式识别和分类的领域。为了进一步利用大脑的计算能力,因此取得了更大的进步,各种研究都取决于尖峰神经网络(SNN),这些神经网络(SNN)紧密地模仿了大脑的计算[2,10,12,14]。snns通过采用神经元模型来实现大脑样的计算,这些神经元模型在传入的尖峰和时间方面改变了内部状态。特别是,各种研究表明了神经元模型的丰富时间动力学,其内部状态逐渐变化为显着的计算性状[8,11]。因此,新兴研究积极投资基于此类复杂模型的SNN的潜在收益。例如,史密斯(Smith)的研究提出了一种基于复杂神经元模型的新组合范式[12,13]。同时,Ponulak等。重现大脑的导航功能[9],其他作品采用SNN进行特征推断[16]或满意度问题[4]。为了部署新兴的SNN工作负载,研究人员依赖SNN模拟系统模拟复杂的神经动力学。不幸的是,现有的SNN模拟系统遭受了高计算开销的困扰,因此,设计一个能够快速且能富有能力的SNN模拟的系统,高度要求。
基于AMESim和MATLAB的电液举升系统控制策略研究
摘要:由于电液举升系统受到流动不稳定性、参数不确定性及不可预测扰动的影响,实现电液举升系统的高精度位置控制具有挑战性。本文提出一种观测器-滑模控制策略来提高拖拉机电液举升系统的控制精度。首先,分析电液举升系统的原理。其次,建立电液举升系统的数学模型,对电液举升系统进行简化,设计观测器,实现对未知系统状态和扰动的实时评估。然后将观测器和滑模控制集成为控制器,以改善系统响应。理论分析表明,该控制器保证执行器在有扰动影响的情况下也能达到期望的控制效果。最后,通过 AMESim–MATLAB 联合仿真和试验研究,将观测器–滑模控制与 PID(比例–积分–微分)控制和滑模控制进行比较。同时,在仿真和试验过程中,采用电液升降系统的对称结构,搭建了耕深模拟系统(液压缸推力的变化模拟耕深值的变化)。结果表明,提出的观测器–滑模控制策略比 PID 控制和滑模控制能够实现更好的位置和压力跟踪以及参数变化的鲁棒性。

高度椭圆形轨道飞行的航天器形成的亚毫米级相对导航技术
摘要:高度椭圆形轨道(HEO)中的航天器的形成(SFF)引起了很多关注,因为在太空探索中的许多应用中,同时精确的指导导航和控制(GNC)技术(尤其是精确的范围)为此类SFF任务提供了成功的基础。在本文中,我们介绍了一种新颖的K带微波炉(MWR)设备,该设备旨在在未来的HEO SFF任务中对亚毫米级的精确范围技术的轨道验证。范围技术是一种同步的双单向范围(DOWR)微波相蓄积系统,在实验室环境中实现了数十微米的范围精度。提供了MWR设备的详细设计和开发过程,并分析了范围的错误源,并考虑了实际的扰动,为HEO形成场景提供了相对的轨道动态模型。此外,引入了一种自适应卡尔曼过滤算法,用于SFF相对导航设计,并结合了过程噪声不确定性。在使用MWR时,SFF相对导航的性能在高精度六个自由度(6-DOF)移动平台的硬件(HIL)模拟系统中测试。使用自适应过滤器的MWR的最终范围估计误差小于35 µm m,范围率为8.5 µm/s,这证明了未来HEO形成任务应用程序的有希望的准确性。

基于模型的气候变化影响对德国北海海岸内陆风险风险的影响是由风暴潮和降水E
摘要。除了风暴潮外,由于强烈的降雨而引起的内陆流量已成为沿海低地的威胁越来越大。尤其是,两种类型的事件的巧合对区域水板构成了巨大挑战,因为它们的技术排水能力有限。在这项研究中,我们分析了基于历史数据和基于场景的模拟,以在德国北海海岸附近的Emden附近敲门。对观察到的内陆流量事件的评估表明,主要是中等风暴潮汐系列与大规模,强烈的降水结合在一起,导致内陆排水系统过载,而单独的最高单个风暴潮或降水事件可以很好地处理。风险管理需要气候预测。因此,建立了水文和水动力海洋模型,并由相同的气候模拟驱动,以估计未来的排水系统过载。对两个气候模型的控制周期的仿真评估可以证实模型可以重现化合物事件的生成机制。风暴潮和降水的巧合导致排水系统的最高载荷,而系统的超负荷也是由一致的降雨事件引起的,而不是由没有强烈降水的暴风雨潮。与过去相当,未来的com-的场景投影基于两个晶体模型和两个排放场景表明,与RCP22.6场景相比,RCP8.5 Scesario的降雨和风暴潮的复合事件将始终如一地与所有研究气候预测的平均海平面上升的背景相比,而模拟系统的过载较高,而RCP8.5 Scesario的模拟系统过载更高。

飞机控制加载系统文献综述...
飞行模拟器有不同的用途。由于硬件限制,全尺寸飞行模拟器通常非常昂贵,并且通常取决于飞机类型。因此,人们观察到并研究了使用虚拟现实设计飞行模拟器的需求 [1-2]。训练飞行员最安全且最具成本效益的方式是通过飞行模拟器。模拟器可帮助飞行员体验涉及真实飞行的各种情况,而无需身临其境并避免风险。飞行模拟器的重要部分是所谓的控制加载系统。飞行装置实例的数量用于管理飞机的运动、飞行控制和驾驶舱仪表。该系统包括硬件和软件部分。通过数字计算机上的程序员进行的模拟属于软件,而结构研究属于硬件。另外两个软件模块支持模拟,其中一个控制 6 个自由度的座舱运动,另一个实现座舱控制装置上的负载再现系统 [3]。飞行模拟器是一种人在回路的实时模拟系统,其中控制加载系统用于模拟飞行员操纵真实飞机时的力感应。全数字控制电控加载系统比液压系统具有技术和成本优势,成为大型模拟器的理想选择 [4]。在过去的几十年里,使用飞行模拟器进行飞行员训练在提高飞行安全性方面发挥了重要作用。飞行模拟器监管资格的现行标准涉及在各种飞机参数的设定公差范围内匹配规定的一组飞行测试数据。尽管综合资格测试指南 (QTG) 验证测试表明模拟与飞行测试数据相符,但飞行员有时会抱怨模拟器中的某些操作感觉不像飞机 [5]。

ECE 636:先进的模拟集成电路(2024 年秋季)...
小型项目和评分复习问题集:将有三个评分小型项目。这些通常涉及电路设计和 CAD 软件的使用。还将有一个评分问题集,旨在复习您的必备知识。学生将单独完成所有小型项目和评分问题集。可能会发布部分问题的解决方案。非评分问题集:将定期提供纸笔式问题集。这些问题集无需提交,也不会评分。可能会发布每组中部分问题的部分解决方案。最终项目:最终项目将由讲师分配,涉及具有各种性能规格的模拟系统(例如,流水线 ADC 的第一级、采样保持放大器等)的晶体管级原理图设计和仿真。学生将单独完成项目。期中考试:学期第 6-8 周(待定)将进行 90 分钟的课堂期中考试。考试将采用闭卷和闭笔记形式。将提供公式表。期末考试:秋季常规考试期间将进行 2.5 小时的期末考试。考试将采用闭卷和闭笔记形式。您将对课程中涵盖的所有内容负责。将提供公式表。 CAD 软件:您将使用 Cadence 的行业标准电路仿真软件(Virtuoso 和 Spectre)来完成小项目和最终项目。无需使用这些 CAD 工具的经验。使用 Linux 的经验很有帮助(因为我们使用的 CAD 工具仅在 Linux 上运行),但这不是必需的。但是,希望您熟悉数学软件,例如 MATLAB 或 Excel。请注意,您可以从信息系统和技术网站(https://uwaterloo.ca/information-systems-technology/)获取 MATLAB、Excel 和其他软件。课程网站: