XiaoMi-AI文件搜索系统
World File Search System油门
航空事故调查处 - GOV.UK
这架波音 737-300 客机从葡萄牙法鲁起飞,执行常规客运飞行后,正在进近伯恩茅斯机场。在仪表着陆系统进近初期,自动油门脱离,推力杆处于怠速推力位置。机组人员既没有下达脱离指令,也没有意识到脱离,整个进近过程中,推力杆一直处于怠速状态。由于飞机已完全配置为着陆,空速迅速下降到低于适合进近的值。机长接管控制并开始复飞。在复飞过程中,飞机过度上仰;机组人员试图降低飞机俯仰度的努力基本无效。飞机最大俯仰角达到 44º,机头上仰,指示空速降至 82 节。然而,机组人员能够恢复对飞机的控制,并在没有发生进一步事故的情况下完成后续进近和在伯恩茅斯着陆。
QUICRUN Fusion Mini16
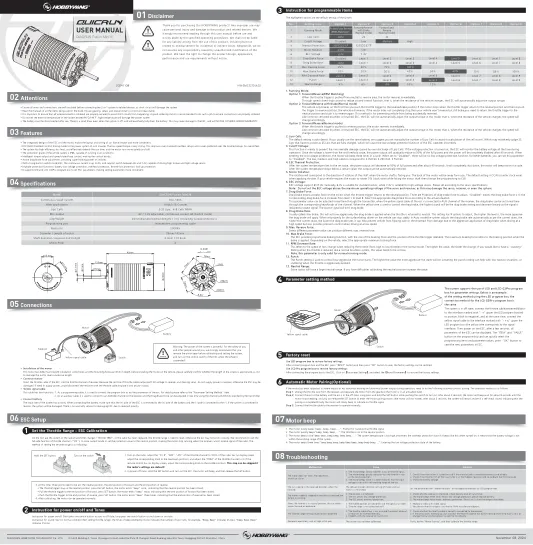
• 电调与电机一体化设计,车架布局布线更加简洁便捷。 • 攀岩车动力系统采用FOC(磁场定向控制)驱动方式,低速扭力强劲,优于标准无刷驱动,整体手感优于有刷驱动。 • 系统效率高,发热量小,有效延长运行时间,电机运转更安静柔和。 • 整机防护等级达到IP66,全工况运行无忧。 • 智能扭矩输出与速度闭环控制,操控得心应手。 • 主动拖拽制动力调节,上坡时提供超强抓地力。 • 内置强效开关模式BEC,持续电流高达4A,支持6V/7.4V切换,可驱动大扭矩高压舵机。 • 多重保护功能:电池低压保护、过热保护、油门丢失保护、锁死保护。 • 支持LED、LCD两种G2/Pro编程盒设置电调参数,设置参数更加便捷。

使用人工智能的自动驾驶汽车
Savinay Mengi 1 和 Yash Devdware 2 计算机工程与技术学院 1,2 麻省理工学院世界和平大学,印度马哈拉施特拉邦浦那 mengisavinay1024@gmail.com 1 和 ydevdware@gmail.com 2 摘要:现代社会,人们致力于实现车辆自动化,以让人类驾驶员轻松驾驶。在汽车领域,人们考虑了使车辆自动化的各个方面。最大的网络谷歌自 2010 年以来就开始研究自动驾驶汽车,并且仍在开发新的变革,以将自动驾驶汽车提升到一个全新的水平。在本文中,我们关注自动驾驶汽车的两种应用,一种是两辆车有相同的目的地,其中一辆车知道路线,而另一辆车不知道。后面的车辆将自动跟随目标(即前方)车辆。另一种应用是在交通拥堵期间进行自动驾驶,因此驾驶员不必不断踩刹车、油门或离合器。本文描述的想法来自自动驾驶汽车,这里考虑的一个方面是使目的地动态化。这可以通过车辆自动跟随另一辆车的目的地来实现。由于在交通中做出智能决策也是自动驾驶汽车的一个问题,因此本文也考虑了这方面。关键词:自动驾驶汽车,人工智能

迈向自动化新范式
担任监控人员时,在检测系统错误和在发生自动化故障时手动执行任务方面存在问题 (Billings, 1988; Wickens, 1992; Wiener and Curry, 1980)。此外,他们还需要监控更复杂的系统。在对自动化问题进行回顾时,Billings (1988) 指出,六起重大飞机事故可直接归因于未能监控自动化系统或自动化系统控制的参数。除了延迟检测到需要干预的问题之外,操作员可能需要相当长的时间才能充分了解系统状态,以便能够采取适当行动。这种延迟可能会阻止操作员执行他们在那里要执行的任务或降低所采取行动的有效性。1989 年,美国航空的一架飞机在拉瓜迪亚机场起飞时坠毁,由于自动油门意外解除而坠入河中,两名乘客丧生 (National Transportation Safety Board, 1990)。机组人员在没有了解问题的情况下试图控制飞机,花费了大量时间,导致中止起飞的决定被推迟,直到为时已晚。

引文 (APA) Varriale, C., Veldhuis, L., & Voskuijl, M. (2020)。使用可达到力矩集实现最大控制权限的调整。在 AIAA Scitech
本文介绍了一种寻找配平飞行条件的方法,同时最大化一个或多个运动轴的可用控制权限。最大俯仰或升力控制权限可以在中止着陆情况下找到有趣的应用,而所有运动轴的最大平衡控制权限则是经典最小控制力概念的重新表述。配平问题以约束优化问题的形式提出。约束和目标函数是通过利用可达到力矩集的几何特性获得的,可达到力矩集是一个凸多面体,包含飞机控制效应器可达到的力和力矩。该方法应用于一种名为 PrandtlPlane 的创新型箱翼飞机配置,其双翼系统可以容纳大量控制面,因此可以实现纯扭矩和直接升力控制。在对称和非对称飞行中,比较了配平条件下的控制面偏转,其中俯仰轴、升力轴具有最大控制权限,平衡控制权限最大。结果表明,该方法能够利用攻角或油门设定来获得控制面偏转,从而最大化指定方向上的控制权。

速度控制的车辆纵向动力学的建模
纵向动态控制是自动驾驶汽车的重要任务之一,它处理速度调节以确保平稳和安全的操作。要设计一个良好的控制器,需要一个简单而可靠的数学模型,以便它可以用作植物并调整控制器。尽管文献中有许多类型的数学模型,但找到适合控制应用程序的数学模型至关重要。该模型不能太复杂,并且可能太简单了。因此,这项工作的主要目的是得出一个简单而可靠的车辆纵向模型,以便可以将其用作MATLAB Simulink中的仿真植物,以测试或调整各种类型的控制算法的性能。该模型由三个主要部分组成,即车身动态,简化动力列车动态和制动动态。为了验证模型的可靠性,标准的城市驱动周期将用作参考速度,并使用具有反植物模型的分层PID控制结构来控制踏板输入,以替代模拟环境中的驾驶员。结果表明,控制器设法通过可接受的踏板压力响应跟踪驱动周期,该响应在40%的油门压力之间,并在20%的制动下按下,这与车辆的正常操作一致。尽管仅显示仿真结果,但该模型可以用作进一步开发和测试不同类型的控制算法的良好起点。

手动控制前馈的控制理论模型
控制车辆是许多人日常生活的一部分。了解人类如何控制车辆对于车辆及其与人类控制器的接口的设计尤为重要。它使工程师能够设计更快、更安全、更舒适、更节能、更通用、更好的车辆。尤其是现在,当自动化使我们能够以各种可以想象的方式支持人类控制器时,了解人类如何控制和与车辆交互非常重要。人类和自动化将动态共享对车辆的控制权。因此,自动化应该(至少!)围绕人类进行设计,但如果自动化的行为方式与人类的控制行为相似,那就更好了。如果自动化表现得像人类控制器,人类控制器就能更好地理解自动化的意图,从而提高安全性、增加舒适度并更容易被接受。人类控制器 (HC) 几乎总是控制着车辆以实现高级目标。为了实现这一高级目标,HC 需要连续执行大量较小的任务,这些任务通过向车辆提供“控制输入”来实现:转动方向盘、踩下油门、拉动直升机上的总杆、转动旋钮等。要理解高级目标和低级控制输入之间的关系,有助于

飞行模拟在 NTSB 事故调查中的作用
John O’Callaghan,NTSB 摘要 模拟是 NTSB 用于了解事故期间控制飞机运动的物理原理的工具之一。如今,NTSB 的工程桌面模拟程序基于 MATLAB,并包括一个“数学飞行员”,可以计算一组飞行控制和油门输入,以匹配给定的飞行轨迹(例如,由记录的雷达或 GNSS 数据确定)。描述飞机的数学模型必须从制造商处获得或以其他方式估算。此工具已用于重现和分析最近几起通用航空事故的记录飞行路径。但是,NTSB 也会在适当的情况下使用其他类型的模拟。本文将讨论美国国家运输安全委员会使用的三个不同级别的模拟:1) 全飞行飞行员训练模拟器,2) 没有飞行员界面的桌面工程模拟,以及 3) 用作事故数据“媒体播放器”的模拟器视觉效果和驾驶舱。这些不同层次将通过以下案例研究进一步说明:2009 年“哈德逊奇迹”在哈德逊河上迫降事件(US1549)、2001 年美国航空 587 号航班在纽约发生的事故(AA587)、2017 年皮拉图斯 PC-12 空间定向障碍事故以及 2015 年 F-16 战斗机与赛斯纳 150 空中相撞。在这些事件的调查中使用了以下模拟器:● 使用空客 A320 全飞行工程模拟器评估 US1549 飞行员可用的着陆选项,该航班在两台发动机因鸟击而失去推力后在哈德逊河迫降。此外,模拟器还用于评估实现规定的迫降着陆标准的操作可行性。● 将空客 A300 全飞行模拟器所基于的数学空气动力学和推进模型整合到桌面工程模拟器(无飞行员界面)中,以分析 AAL587 飞行数据记录器上记录的飞机运动。这项分析用于确定飞行员飞行控制输入和外部大气扰动(由尾流穿透引起)对飞机运动和载荷的相对重要性。此外,NASA Ames“垂直运动模拟器”(VMS)用于重现 AA587 场景,复制事件期间的视觉场景、驾驶舱控制运动、仪表显示、载荷系数(在限制范围内)和声音(包括驾驶舱语音记录器音频)。VMS 的这种“反向驱动”使调查人员能够评估飞机加速度可能如何影响副驾驶对方向舵踏板和其他飞行控制装置的反应。● 在桌面工程模拟器中使用 Pilatus PC-12 的仿真模型来计算一组飞行控制和油门输入,从而匹配记录的雷达数据。● 最后,对于空中相撞的情况,使用 Microsoft Flight Simulator X 描绘每架飞机驾驶舱的视觉场景,包括从每位飞行员的角度看到的冲突飞机的外观。该动画使调查人员能够确定每架飞机在碰撞前几分钟的可见性,并有助于说明“看见并避免”碰撞避免概念的局限性,以及驾驶舱显示交通信息的好处。

驾驶舱界面设计对飞行员状况的影响...
有许多事故和事件与模式混淆有关。自动油门和自动驾驶仪传统上是驾驶舱中的独立系统,但它们可以通过飞行物理相互作用。航空电子工程师一直在应用自动化来减少飞行员的工作量并提高飞行安全性。虽然基本的自动化系统执行相当简单的任务,例如保持高度或航向,但现代飞行引导和控制系统通常具有不同的操作模式。结合眼动追踪和 NASA-TLX 测量,将新的飞行模式指示器 (FMA) 概念与传统 FMA 进行了比较。该实验涉及 17 名年龄在 22 至 47 岁之间的参与者(M = 29.18,SD = 6.73)。结果表明,增强显示显著降低了 NASA-TLX 对心理需求、时间需求和努力的感知工作量;同时通过呼叫模式变化的感知提高了爬升转弯期间的性能和情况意识。此外,参与者的注视持续时间在传统设计和通过添加绿色边框的视觉提示的增强设计之间对空速和高度指示器有显著差异。解释现有飞行模式提示需要付出相对较高的认知努力,这无疑是造成模式混淆的一个因素。注视持续时间和主观工作量之间的显著差异证明了所提出的可视化提示对 FMA 的潜在好处。作者:simp
![AC 07-001 飞行记录器_CAAP [A]2011.fm](/simg/4\4dd5654f9378ab17077a3339c9ee460e3182082b.webp)
AC 07-001 飞行记录器_CAAP [A]2011.fm
警告 主飞行控制面和主飞行控制飞行员输入:俯仰轴、滚转轴、偏航轴 标记信标通道 每个导航接收器频率选择 手动无线电传输键控和 CVR/FDR 同步参考 自动驾驶仪/自动油门/AFCS 模式和接合状态* 选定的气压设置*:飞行员、副驾驶 选定的高度(所有飞行员可选择的操作模式)* 选定的速度(所有飞行员可选择的操作模式)* 选定的马赫(所有飞行员可选择的操作模式)* 选定的垂直速度(所有飞行员可选择的操作模式)* 选定的航向(所有飞行员可选择的操作模式)* 选定的飞行路径(所有飞行员可选择的操作模式)*:航向 /DSTRK、路径角 选定的决断高* EFIS 显示格式*:飞行员、副驾驶 多功能/发动机/警报显示格式* GPWS/TAWS/GCAS 状态*:选择地形显示模式,包括弹出显示状态、地形警报、警告和注意事项以及建议、开/关开关位置 低压警告*:液压压力、气压 — 计算机故障* 客舱失压* TCAS/ACAS(交通警报和防撞系统/机载防撞系统)* 冰探测* 发动机警告每个发动机振动* 发动机警告每个发动机过热* — 发动机警告每个发动机油压低* 发动机警告每个发动机超速* 风切变警告* 操作