XiaoMi-AI文件搜索系统
World File Search System测速

用于太空应用的人工智能测速。......
人工智能测速 [1] 是 2017 年提出的一项技术,其中神经网络用于根据(最初为 2D)观测活动的稀疏和噪声测量重建某些流场。后来,它被改编为使用基于物理的神经网络 [2,3],并被提议用于改进阿尔茨海默氏症和小血管疾病的研究。然而,该技术似乎普遍适用于逆问题,其中稀疏观测值可在由一组偏微分方程控制的连续场上获得。卫星燃料晃动、太空推进、卫星热控制等情况似乎都为将类似技术应用于太空研究提供了良好的候选方案。

通过自动测速设计和检测坑洼
该项目的主要目的是自动控制城市和禁区(如学校、公园、医院和限速区等)内任何车辆的超速。如今,世界上所有人都没有自制力。高速驾驶车辆的人。所以警察无法监控这些东西。坑洼检测系统是一种旨在警告驾驶员道路上状况不佳和坑洼的系统。该系统由传感器(超声波传感器)组成,可检测坑洼和所需的网络连接。将进行调查并将数据存储在可更新的云端。用户可以在 Google 地图上看到坑洼位置,这有助于避开坑洼。控制器会比较车速,如果超过限速,控制器会提醒驾驶员,并自动采取行动。
高压低温风洞中氮气无种子测速:第三部分。共振飞秒激光标记
摘要 首次在高压、低温条件下表征了选择性双光子吸收共振飞秒激光电子激发标记 (STARFLEET) 测速技术。研究在美国宇航局兰利研究中心的 0.3 米跨音速低温风洞中进行,流动条件涵盖了该设施的整个运行范围;总压力范围从 100 kPa 到 517 kPa,总温度从 80 K 到 327 K,马赫数从 0.2 到 0.85。检查了 STARFLEET 信号强度和寿命测量的热力学依赖性,因为强度和寿命都会影响测量精度。发现信号强度与密度成反比,而寿命与密度几乎成线性关系,直到接近氮的液汽饱和点。速度测量的准确度和精度是在整个条件范围内评估的,标准误差确定为 1.6%,而精度范围约为自由流速度的 1.5% 至 10%。还观察到精度具有温度依赖性,这可能是由于在较高密度下寿命较长所致。

大型高超声速风洞中的非侵入式自由流速度测量
I.简介 高速风洞通常依靠压力和/或温度测量以及喷嘴流量计算来确定自由流条件。这种做法可能需要对气体的热化学状态进行复杂的处理。当空气或 N 2 从停滞的储层流向自由流马赫数 M ∞ > 6 时,热量完美气体假设开始失效。喷嘴中的快速膨胀可能需要对热力学非平衡过程进行建模,如果气体停滞到高焓,还必须考虑非平衡化学 [1]。此外,对于高储层密度,可能需要使用排除体积状态方程 [2,3]。尽管这些流动的建模框架是可处理的,但与热化学速率过程有关的一些基本原理仍然是一个持续的研究课题 [1]。验证这些运行条件和喷嘴流量计算的一种方法是在自由流中直接测量。基于粒子的测速方法,例如粒子图像测速,可以产生高质量的多组分速度数据 [4]。然而,在大型高速设施中实施基于粒子的技术所面临的工程挑战包括时间、粒子接种密度和均匀性,以及在注入粒子时最大限度地减少流动扰动 [5]。更重要的是,在高速风洞中,典型的克努森数和雷诺数 [6] 下粒子响应降低存在根本限制,这可能会影响精细时间和长度尺度的分辨率。与基于粒子的技术的局限性相比,标记测速技术的实施不受上述大型高速设施中问题的限制。标记测速技术的著名方法和示踪剂包括VENOM [7]、APART[8]、RELIEF[9]、FLEET[10]、STARFLEET[11]、PLEET[12],

2025 年 RTC 立法计划
• 保护现有交通管理局的专项资金 • 提供工具帮助交通机构支持以公共交通为导向的发展 (TOD) 和/或提供资金补充 TOD 融资/公私合作伙伴关系,同时允许城市在发展决策中保持主导地位和地方控制权 • 将大约 8000 万美元的空气质量使用费返还给县用于地方倡议项目 • 与 TxDOT 和立法机构一起审查与成立新的州高速铁路管理局相关的选项 • 为所有用户提高全州交通系统的安全性;降低超速限制,减少鲁莽驾驶,消除酒后驾驶,强制使用安全带;推进 90 英里/小时以上自动测速执法 • 通过技术和电子标牌实现施工区信息传递的现代化;支持施工区的自动测速执法 • 为县和市提供更多的土地使用控制工具,以保护未来的交通走廊和安全需求 根据要求提供证词
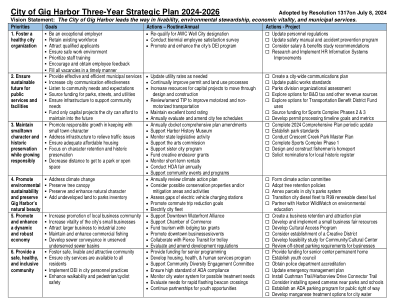
吉格港市 2024-2026 年三年战略规划
为老年中心永久住所提供资金 成立青年委员会 获得警察局认证 更新应急管理计划 安装 Cushman Trail/Harborview Drive 连接步道 考虑在公园和学校附近安装测速摄像头 为公共通行权制定 ADA 停车计划 开发城市水的锰处理方案

出版版本 (APA) 引用:Fairley, I.、Williamson, B.、McIlvenny, J.、King, N.、Masters, I.、Lewis, M.
Dyfyniad o'r fersiwn a gyhoeddwyd / 已发布版本的引用 (APA):Fairley, I., Williamson, B., McIlvenny, J., King, N., Masters, I., Lewis, M., Neill, S., Glasby, D., Coles, D., Powell, B., Naylor, K., Robinson, M., & Reeve, DE (2022)。基于无人机的大规模粒子图像测速技术应用于潮汐能资源评估。可再生能源,196,839-855。https://doi.org/10.1016/j.renene.2022.07.030

高雷诺数的先进测量技术...
本文讨论了适合在工业规模加压低温风洞中运行的一些非侵入式测量技术的开发、鉴定试验和应用。介绍了低温温度敏感涂料 (cryoTSP) 作为过渡检测工具的应用,以及图像模式相关技术 (IPCT) 和后向纹影法 (BOS) 在欧洲跨音速风洞 (ETW) 中的实施。介绍了低温压敏涂料 (cryoPSP) 的开发进展,并介绍了建立适用于低温的粒子图像测速系统 (cryoPIV) 的考虑因素。此外,还介绍了麦克风阵列技术 (MAT) 在工业规模低温风洞中的适应状态。

光电子研究所
• • “波普拉德”自行防空武器 • • ZSU-23-4MO“比亚瓦”防空火炮和导弹系统 • • 小型武器的热武器瞄准器 • • 生物武器检测系统 • • THz 范围内危险材料光谱特性系统 • • 防火和抑制爆炸的光电系统 • • 用于检查夜视设备的通用测试装置 • • 双色散射激光雷达 • • 用于水下物体检测的散射激光雷达 • • 荧光激光雷达 • • 高峰值功率 Er:YAG、Tm:YLF、Cr:ZnSe、Ho:YAG、Ho:YLF、Tm 光纤激光器 • • 高峰值功率、人眼安全的 Er 光纤激光发射器 • • 中红外超连续光纤激光源 • • 用于痕量气体检测的光电 CEAS 系统 • • 激光车辆测速系统 • • 基于距离选通成像系统的激光摄影系统