XiaoMi-AI文件搜索系统
World File Search System测量结果
关于共和国航天工业的发展......
通过位于阿拉木图的 CALLISTO 光谱仪测量太阳的射电光谱,以及频率为 1.08 GHz 和 2.8 GHz(海拔 2700 米)的太阳射电发射通量密度。所有测量结果都包含在一个通用信息系统中,该系统以高分辨率显示实时测量结果。


ENVI-AMC - 环境电子
ENVI-AMC 分析仪可以连接到多点采样器,也可以用作单点分析仪。ENVI-AMC 机架分析仪可以集成到现有测量系统的一部分。测量结果、历史数据、手册和设置可以通过分析仪自己的基于 Web 的用户界面轻松获取,并具有必要的工业接口,如 RS232、USB 和以太网。测量结果可以发送到具有 4-20mA 输出的外部系统。还有继电器输出和数字输入可用。
密西西比州和学校员工的生活和健康......
由于以下因素,未来的精算测量结果可能与本报告中提出的当前测量结果存在很大差异:退休人员团体福利计划的经验与假设预期的不同;假设发生变化;这些测量方法的自然运作中预期的增加或减少(例如摊销期结束或根据计划的资金状况而产生的额外成本或缴费要求);以及退休人员团体福利计划条款或适用法律的变化。退休人员团体福利模型必然依赖于近似值和估计值的使用,并且对这些近似值和估计值的变化很敏感。这些近似值和估计值的微小变化可能会导致精算测量结果发生重大变化。由于这些因素的潜在影响超出了财务报告要求的范围,因此本文未提供对结果范围的分析。本报告未考虑所有可能的情况。
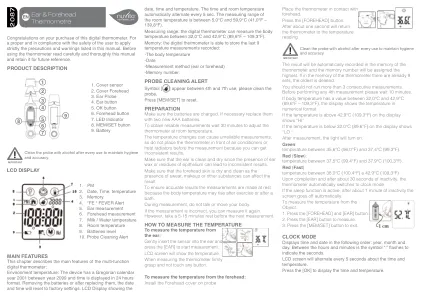
耳朵和额头温度计 2087 - Nuvitababy.fr
确保电池已充电。必要时,请用两节新的 AAA 电池更换。为了获得可靠的测量结果,请等待 30 分钟,在室温下调整温度计。温度变化会导致不可靠的测量结果,因此在测量前请勿将温度计放在空调或散热器前,因为您可能会得到不一致的结果。确保耳朵清洁干燥,因为耳垢或上皮残留物的存在会导致不一致的结果。确保前额皮肤干燥清洁,因为汗水、化妆品或其他物质的存在会影响结果。为确保结果准确,请在休息时进行测量,因为运动或沐浴后体温可能会升高。测量期间,请勿说话或移动身体。如果测量结果不正确,可以重新测量。但是,下次测量前请休息 5-15 分钟。
通过 ADS 工具中的 S2D 模型导入实验结果进行功率放大器设计
摘要 本文利用 S2P 和 S2D 模型设置实现功率放大器的行为建模。利用标准功率放大器获得散射 (S 参数和大信号参数的测量结果。将这些参数导入 S2P 和 S2D 模型以执行 3 GHz 频率下的小信号和大信号分析。然后,将模拟结果与测量结果进行比较,以验证行为模型的有效利用。这项工作的新颖之处在于对直接从测量中获得的硅基驱动放大器特性进行模拟研究。这项工作可用于通过模拟确定驱动放大器特性对功率放大器测量的影响。最后,对不同参数的测量结果和模拟结果之间的相对误差性能分析进行研究,并计算 S11、S12、S21、S22、增益、pout、1 dB 压缩点、ACP、3 次谐波、4 次谐波的 NMSE(单位为 %)次谐波和 5 次谐波分别为 0.0083、0.0055、0.0086、0.011、0.0844、0.814、0.926、0.71、0.22、0.012 和 0.070。

使用舰载固定翼无人机... - AMS 期刊
从研究船上部署和回收自主或遥控平台已成为显著扩展研究船队能力和范围的一种方式。本文介绍了从船上发射和回收的波音 Insitu ScanEagle 无人机 (UAV) 的使用情况。在 2012 年 10 月的中太平洋赤道混合 (EquatorMix) 实验和 2013 年 7 月的弗吉尼亚海岸三叉戟勇士实验期间,无人机被用来表征海洋大气边界层 (MABL) 的结构和动态,并测量海洋表面过程。无人机测量结果包括大气动量和辐射、感热和潜热通量,并辅以船载仪器的测量结果,包括前桅 MABL 涡流协方差系统、激光雷达高度计和数字化 X 波段雷达系统。在 EquatorMix 期间,无人机测量结果揭示了船舶测量未采样的纵向大气滚动结构,这对热量和动量的垂直通量有重大影响。使用天底无人机激光雷达,可以观察到内部波的表面特征,与船载 X 波段雷达、水文多普勒声纳系统和理论模型的测量结果一致且连贯。在三叉戟勇士实验中,仪器化的无人机用于演示将无人机的气象数据实时同化到区域耦合海洋-大气模型中。仪器化的无人机在偏远海洋位置的大气和海洋测量中提供了前所未有的时空分辨率,展示了这些平台扩展海洋和大气研究舰队范围和能力的能力。

使用舰载固定翼无人机进行测量...
从研究船上部署和回收自主或遥控平台已成为显著扩展研究船队能力和范围的一种方式。本文介绍了从船上发射和回收的波音 Insitu ScanEagle 无人机 (UAV) 的使用情况。在 2012 年 10 月的中太平洋赤道混合 (EquatorMix) 实验和 2013 年 7 月的弗吉尼亚海岸三叉戟勇士实验期间,无人机被用来表征海洋大气边界层 (MABL) 的结构和动态,并测量海洋表面过程。无人机测量结果包括大气动量和辐射、感热和潜热通量,并辅以船载仪器的测量结果,包括前桅 MABL 涡流协方差系统、激光雷达高度计和数字化 X 波段雷达系统。在 EquatorMix 期间,无人机测量结果揭示了船舶测量未采样的纵向大气滚动结构,这对热量和动量的垂直通量有重大影响。使用天底无人机激光雷达,可以观察到内部波的表面特征,与船载 X 波段雷达、水文多普勒声纳系统和理论模型的测量结果一致且连贯。在三叉戟勇士实验中,仪器化的无人机用于演示将无人机的气象数据实时同化到区域耦合海洋-大气模型中。仪器化的无人机在偏远海洋位置的大气和海洋测量中提供了前所未有的时空分辨率,展示了这些平台扩展海洋和大气研究舰队范围和能力的能力。


测量改变的伊辛量子临界性
量子临界系统因其对扰动的固有敏感性而成为探索新测量诱导现象的有吸引力的平台。我们使用显式协议研究测量对典型 Ising 量子临界链的影响,其中关联的辅助粒子与临界链纠缠,然后进行投影测量。使用由大量数值模拟支持的微扰分析框架,我们证明测量可以定性地改变临界相关性,其方式取决于纠缠门的选择、辅助测量基础、测量结果和辅助相关性的性质。我们进一步表明,通过后选择高概率测量结果,或者在某些情况下,通过对位于不同对称扇区的测量结果分别平均可观测量,可以在具有 100 阶量子比特的实验中以令人惊讶的速度高效地实现测量改变的 Ising 临界性。我们的框架自然适应更奇特的量子临界点,并突出了在嘈杂的中尺度量子硬件和里德伯阵列中实现的机会。