XiaoMi-AI文件搜索系统
World File Search System测量飞机
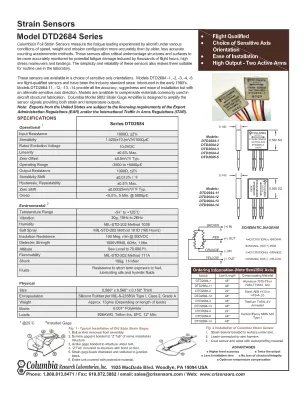
应变传感器 - 型号 DTD2684 系列
crlsensors.com › dtd2684-11 PDF 2016 年 12 月 16 日 — 2016 年 12 月 16 日 ... 传感器测量飞机在各种... 重量矩阵下的疲劳载荷。 10Hz 至 2KHz。

标签 AIR III 重力计 - Micro g LaCoste
来自测量飞机和 GPS 基站的原始现场数据可以立即处理,以产生沿测量线的自由空间和布格重力异常。处理后的数据可以导出到地图绘制软件包(例如 geosoft oasis montaj)或通用地图绘制工具 (gmt),以执行诸如测量线水准测量、网格化和地图绘制等任务。通过快速的数据周转,可以识别数据质量问题和可能的系统问题,并及时处理操作问题。

工业 4.0 — 系统方法 | Infosys
• 据媒体报道,波音 737 Max 问题的一个根本原因是分区方法。据分析师称,最初的 MCAS 飞机机动系统依靠来自多个传感器的数据来测量飞机加速度和迎风角度等参数。这确实确保了软件不会出现错误。但在升级后的系统中,为了避免在各种情况下失速,MCAS 被允许通过向下推机头来控制飞行俯仰。但只使用了一个飞机迎角传感器的数据,消除了之前的补偿冗余。在设计和测试新系统时,从系统角度来看,需要在多种情况下测试 MCAS 以识别故障模式。
ACP 32 第 3 卷 PDF - 967 中队空军学员
5. 我们用英里每小时 (mph) 来测量陆地车辆(例如汽车、自行车)的速度。在航空领域,由于我们使用 nm 来测量距离,因此速度以 nm 每小时(帆船时代称为节)为单位来测量。与陆地车辆的另一个区别是,由于飞机不在地面上,因此不能使用车轮旋转的速度来驱动速度计。当飞机在空中飞行时,我们使用一种称为空速指示器 (ASI) 的仪器来测量“动态压力”,即飞机向前运动引起的压力。我们通过测量飞机周围空气的压力(大气压力或“静压”)与皮托管中捕获的空气压力(“皮托管压力”)之间的差异来实现这一点,皮托管压力由静压和动压组成。

用于研究的大规模 ADS-B 传感器网络
空域日益拥挤,需要更高效的空中交通管理。为了满足未来的需求,世界各地的航空当局目前正在对传统空中交通管理系统进行重大升级,以升级为下一代航空运输 (NextGen) 系统。NextGen 的关键组件之一是广播式自动相关监视 (ADS-B) 技术。与从地面天线测量飞机距离和方位的标准雷达监视技术(例如一次监视雷达 (PSR) 和二次监视雷达 (SSR))相比,ADS-B 允许飞机使用全球导航卫星系统 (GNSS) 确定自己的位置,然后通过无线电频率定期将其广播到地面站或附近的其他飞机。因此,NextGen 的主要优势之一是能够持续广播有关高度、航向、速度和其他飞行信息,从而降低对昂贵且相对不准确的 PSR 的需求

位置、地点、高度测量
为了将垂直间隔降至最低标准,需要精确监测飞机的巡航高度。这里关注的重点是测量飞机高度和海平面之间的距离。该距离可以通过机载气压高度计估算,也可以通过机载或地面站的电子无线电波系统测量。第一类设备的指示称为压力高度,或简称为高度,而第二类设备的指示称为几何高度或简称为高度。空中交通管制 (ATC) 中心的高度信息基于飞机应答器系统在收到由二次监视雷达发送的适当询问(称为模式 C 询问)后发送的压力高度测量值。实际上,高度信息是通过表示压力/高度关系的公式转换为高度指示的大气压力测量值。当飞机获准飞行高度时,实际上意味着飞行员必须继续在等压面上飞行。然而,高度测量系统可能会出现系统误差(偏差),这些误差对于每架飞机来说都是不同的,并且会严重影响安全性。因此,高度测量

提高飞机地面处理效率
摘要:本研究旨在提高机场飞机地面处理的效率。本研究的主要目标是改进飞机地面处理的单个流程,以加快此操作,并改善单个航班之间的周转时间,从而提高机场停机位的总体吞吐量。本研究的目的是测量飞机处理的标准机场流程的时间,测量选定机场单个航班之间的周转时间,并提高每个测量流程的效率。测量完成后,引入变化,并再次测量时间。变化主要集中在以下方面:飞机到达前地面处理设备的位置、人员部署以及地面处理设备所走的路线。测量是在夏季在固定站台上进行的,员工人数与标准人数相同,使用的飞机类型也相同。总共进行了 78 次测量,其中在飞机起飞前往下一个目的地之前的整个地面处理过程中测量了 2340 个部分时间。实施更改后,再次进行相同的测量,以查看实施的更改是否可以加快飞机地面处理的整体过程。随后,使用统计方法评估所有数据。所有测量均在科希策机场进行。

考试问题:AE3-295-II - Aerostudents
1. 导航系统(30 分) 在本题中我们考虑 DME 无线电信标。 [a] DME 这个缩写代表什么?(3 分) 解答:DME 代表测距设备 [b] DME 系统如何工作? 在你的回答中,包括:(12 分) 1. 地面设备和机载设备(如果有)的描述, 解答:地面设备是地面应答器或信标,由天线、接收器、发射器组成。机载设备称为机载询问器。 2. DME 的基本工作原理, 解答:DME 基于测量飞机机载 DME 询问器发射的脉冲与地面 DME 应答器接收回的脉冲(固定时间延迟 50 µ s 后)之间的时间间隔。机载设备计算飞机和 DME 站之间的斜距(视距)。 3. DME 信号特性,解决方案:飞机询问器在 962 至 1213 MHz(UHF)之间的 126 个频率之一上传输脉冲。DME 通道由两个载波频率组成,始终相隔 63 MHz。例如,询问器使用 1025 MHz 载波作为询问脉冲序列,然后响应器使用 962 MHz 载波作为返回脉冲。脉冲采用 cos2 形状,在载波上进行幅度调制,成对相隔 12 µ s。每个脉冲持续 3 µ s(因此一个脉冲中大约有 3000 个载波周期)。4. DM 的不同模式
针对林业应用的多回波激光雷达评估
前言 本报告由美国农业部林务局的清查与监测 (I&M) 指导委员会发起和资助。I&M 指导委员会由清查与监测研究所特许成立,旨在调查新兴技术并确定其对林务局 I&M 问题的帮助潜力。遥感应用中心感谢 I&M 指导委员会的指导和指导,以及圣迪马斯技术与发展中心提供的项目监督。作者认为,提供的意见促成了更具体的最终报告,以满足现场需求。摘要 Spencer B. Gross, Inc. (SBG) 被选中评估多回波 LIDAR(光检测和测距)技术在美国农业部林务局的应用。本研究使用的数据集位于美国西北部(俄勒冈州、华盛顿州和蒙大拿州)。三个站点有现有数据,并为另外三个站点收集了新的 LIDAR 数据。这些站点被选中是因为具有西北植被群落的代表性样本、坡度特征和土地管理处理。对于许多此类场所,辅助数据(如地图、照片、清单数据)和现有关系(即大学人员和学生、林业联系人、政府联系人)可用于验证目的。地理空间信息为有效的森林管理实践奠定了基础。使用传统技术(包括航空摄影、摄影测量和实地工作)获取高质量数据相对昂贵且耗时。某些数据元素(如西北林地可靠的 20 英尺等高线的裸地地形模型)非常难以获取。多回波 LIDAR 可以捕获密集点数据,这些数据定义第一个表面(冠层)并通过许多点撞击地面来穿透植被。因此,只需一次飞行就可以“绘制”冠层、裸地和许多结构特征,如冠层高度、体积和基部直径。LIDAR:技术机载激光扫描的发展可以追溯到 20 世纪 70 年代早期的 NASA 系统。尽管笨重、昂贵,且仅限于特定应用(例如简单测量飞机在地球表面上的精确高度),这些早期系统还是证明了该技术的价值。
多回波激光雷达在林业应用方面的评估
前言 本报告由美国农业部林务局的清单和监测 (I&M) 指导委员会发起和资助。I&M 指导委员会由清单和监测研究所特许成立,旨在调查新兴技术并确定其帮助解决林务局 I&M 问题的潜力。遥感应用中心感谢 I&M 指导委员会的指导和指导,以及圣迪马斯技术和开发中心提供的项目监督。作者认为,提供的意见产生了更具体的最终报告,可以满足现场需求。摘要 Spencer B.Gross, Inc. (SBG) 被选中评估多回波 LIDAR(光检测和测距)技术在美国农业部林务局的应用。本研究使用的数据集位于美国西北部(俄勒冈州、华盛顿州和蒙大拿州)。三个站点有现有数据,另外三个站点收集了新的激光雷达数据。选择这些站点是因为这些站点具有西北植被群落、坡度特征的代表性样本,并且具有土地管理处理。对于其中许多站点,辅助数据(例如地图、照片、清单数据)和现有关系(即大学人员和学生、林业联系人、政府联系人)可用于验证目的。地理空间信息为有效的森林管理实践提供了基础。使用传统技术(包括航空摄影、摄影测量和实地工作)获取高质量数据相对昂贵且耗时。某些数据元素(例如西北林地中可靠的 20' 轮廓的裸地地形模型)很难获得。多回波激光雷达提供了捕捉密集点数据的机会,这些数据定义了第一个表面(冠层)并穿透植被覆盖层,许多点都击中地面。因此,有可能通过一次飞行“绘制”冠层、裸地和许多结构特征,如冠层高度、体积和基部直径。激光雷达:技术 机载激光扫描的发展可以追溯到 20 世纪 70 年代早期的 NASA 系统。尽管这些早期系统笨重、昂贵且仅限于特定应用(例如仅测量飞机在地球表面上的准确高度),但它们证明了该技术的价值。