XiaoMi-AI文件搜索系统
World File Search System浮标

非线性沙漏浮标设计
桑迪亚国家实验室的研究人员开发了一种非线性控制技术,该技术利用了WEC沙漏的几何浮标设计和复杂的共轭控制(C3)策略,以优化多谐振条件下的功率吸收。沙漏浮标设计在波浪的重大运动或单个自由度的运动中运行,并且表现出比现有解决方案的优惠性能。沙漏浮标几何形状与海浪之间的独特相互作用产生了非线性立方存储效应,从而在操作过程中产生实际的能量存储或反应性。由于反应能力和能源存储系统(ESS)要求固有地嵌入了非线性浮标几何形状中,因此它仅需要简单的速率反馈控制,而无需存储或电源电子设备。通过专注于实现多谐和,这种开发可以增加WEC发电,使大小和重量减少,并有可能使现代WEC设计发电高效。

带有漂流浮标数据的案例研究
摘要:在海上研究以及搜索和救援操作中,建立或预测漂流物体的轨迹很重要。可以使用带有海洋动态模型的传统工具或通过人工智能模型来确定漂移对象的轨迹。从2003年12月19日至12月28日之间收集的漂流浮标数据中,研究小组采用了CNN(CORV1D)模型进行分析。分析结果表明,通过使用ADAM优化器,Huber损耗函数和256个过滤器,在隐藏层中,该模型性能的特征参数被确定为RMSE = 0.04004,MAE = 0.032304度,R²= 98%。使用SGD优化器和均方误差(MSE)损耗函数时,与先前情况相比,RMSE和MAE值最多降低了四倍,而R²值则在隐藏层中有64个过滤器达到99.9%。当隐藏层中的过滤器数增加到128时,CNN(CORV1D)模型的性能提高了20%,RMSE = 0.007863DEG,MAE = 0.006653DEG。使用CNN(Conv1D)模型使用SGD优化器预测漂移浮标的轨迹时,R²值和MSE损耗函数接近约100%,这表明该模型适用于预测漂流浮标轨迹的输入数据。将模型隐藏层中的过滤器数量从128增加到256并没有改变模型的预测性能,这表明该情况的最佳过滤器数为128。未来的工作应继续使用较大的输入数据集进行漂移数据分析。但是,这项研究中获得的RMSE结果仍然相对较大(0.87 km),这可能是由于输入数据有限。

自由浮动浮标声纳定位系统
海水中近表面声速 3'4 (1483 m s-r) 到频率计数器。门控周期由射频询问脉冲和声纳返回信号之间的持续时间设置。反射的声纳信号不会影响距离测量,因为它们的传播时间更长。 一对接收换能器安装在特殊形状的黄铜浮标下方,重 4 公斤 [图 3(a)],并通过一段尼龙绳悬挂在海面以下约 4 米处(图I )为浮标位置的三角测量计算提供了基线。通过比较换能器悬挂点之间的测量分离与换能器分离的声纳距离测量,确定此布置的基线稳定性在 * 0.I m 以内。在典型的实验情况下,即前后基线为 15 米,距离应答浮标 200 米,接收传感器的信噪比为 30 dB,通过三角测量计算和位置数据的统计处理,浮标位置可以在 * 0.5 米的精度范围内确定(第III B 节)。

EC-47 - 阿库浮标、尖刺浮标、马斯尔浅滩和冰屋白
北越没有空运能力,他们只剩下两个选择,陆运和水运。越南沿海路线以及整个内陆水道和湄公河系统都受到南越和美国海军的监视和阻断。警察和军事当局实施了河流监视计划,通过非军事区进入南越的陆路路线被彻底阻断,以至于利用最初未参与冲突的其他国家成为实施入侵的主要手段。随后老挝和柬埔寨作为运输路线的介入违反了各种国际条约和协议。人们很早就认识到,北越及其在老挝和柬埔寨的有组织的叛乱不符合公认的国际规则。尽管许多物资仍通过南越的正规和临时共产主义部队,但这些补给线的阻断挽救了数千名美国和盟军的生命。开始 1966 年 8 月,一个科学研究小组(杰森小组)被邀请提交一份提案,讨论在非军事区下方越南各地建立广泛的空中支援反人员屏障系统。9 月,国防部长麦克纳马拉成立了国防通信规划小组来实施这一概念,后来将任务范围扩大到覆盖越南、老挝和
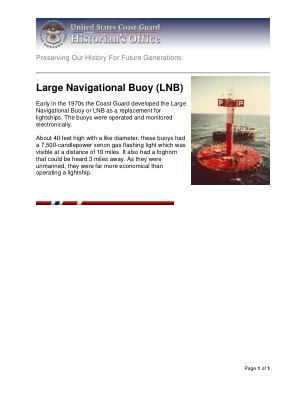
大型航海浮标 (LNB)
这些浮标高约 40 英尺,直径相同,配有 7,500 烛光氙气闪光灯,可在 10 英里外看到。它还配有一个可在 3 英里外听到的雾笛。由于它们是无人驾驶的,因此比操作灯塔船要经济得多。

MDSPGP-6 活动 a (6) 系泊浮标
MDSPGP-6 活动 a (6) 系泊浮标 授权的系泊浮标活动必须符合以下适用的活动特定条件、本许可证的所有一般条件以及任何项目特定的特殊条件。此活动授权放置系泊浮标(第 10 节)(美国可航行水域,包括美国非潮汐可航行水域。)。A 类影响限制和要求:
系泊浮标和其他海洋数据指南...
一些会员国已经认识到系泊海洋数据浮标的价值,并已建立了自己的系泊浮标计划,而其他会员国则正在考虑启动此类计划。漂流浮标合作小组 (DBCP) 在其第二届会议(日内瓦,1986 年 10 月)上指出,明确需要一份关于系泊浮标的技术文件,该文件既可以为希望启动计划的国家提供基本信息,也可以作为在该领域已经活跃的国家之间分享经验的手段。因此,DBCP 建议考虑编写《系泊浮标和其他海洋数据获取系统指南》,其思路应与现有的《漂流数据浮标指南》(IOC 手册和指南第20 号)类似。
自由浮动浮标声纳定位系统
将海水中近表面声速3'4 (1483 m s-r) 发送到频率计数器。门周期由射频询问脉冲和声纳返回信号之间的持续时间设置。反射的声纳信号由于传播时间较长,不会影响距离测量。一对接收换能器安装在重 4 千克的特殊形状的黄铜浮标下方 [图 3(a)],并通过一段尼龙绳悬挂在海面以下约 4 米处(图 1),为浮标位置的三角测量计算提供了基线。通过比较换能器悬挂点之间测得的分离度与换能器分离的声纳距离测量值,确定此布置的基线稳定性在 * 0.1 m 以内。在典型的实验情况下,即前后基线为 15 米,到应答浮标的范围为 200 米,接收传感器的信噪比为 30 dB,通过三角测量计算和位置数据的统计处理,可以在 * 0.5 米的精度范围内确定浮标位置(第 III B 节)。

SMS 概况介绍 - 聪明浮标 - SharkSmart
“Clever Buoy”™ 由 Smart Marine Systems(前身为 Shark Mitigation Systems)开发,使用声纳技术和专业视频软件来探测鲨鱼并向海滩管理部门传输关键信息。声纳传感器就像指向大海的巨型前灯,安装在海底,与探测软件配合使用,可以扫描鲨鱼和海洋生物。该装置部署在冲浪区之外,搜索鲨鱼独特的运动模式。