XiaoMi-AI文件搜索系统
World File Search System深空






在深空应用程序的视线导航上
视线(LOS)导航是一种光学导航技术,可利用从车载成像系统获得的可见天体的方向,以估算航天器的位置和速度。将方向馈送到估计过滤器中,其中它们与观察到的物体的实际位置匹配,该位置是从船上存储的胚层检索的。作为LOS导航代表了下一代深空航天器的一个真正有希望的选择,这项工作的目的是提供有关效果的新见解。首先,分析信息矩阵以显示航天器和观察到的行星之间的几何形状的影响。然后,使用Monte Carlo方法来研究测量误差的影响(范围从0.1到100 ARCSEC)和跟踪频率(从每天的四个观测值到每两天的观察范围)。通过两个指标对导航性能的影响进行了影响。首先是3D位置和速度均方根排出,一旦估计被认为是稳态的。第二个是收敛时间,它量化了估算到达稳态行为所需的时间。模拟基于一组四个行星,这些行星不遵循共同的以heliepentric动力学的速度,而是绕太阳旋转,并以相同的(无距离)角速度的角速度旋转。这种方法允许将方案依赖性行为与导航固有属性分开,因为在整个模拟过程中观察者和观察到的对象之间的相同几何形状是相同的相对几何形状。结果为下一代自主导航系统提供了有用的指南,既可以定义硬件要求和设计适当的导航策略。然后将注意事项应用于近地球小行星的任务方案,以定义导航策略和硬件要求。显示了航天器和行星之间相对角度的重要性。在单个球衣观察方案中,当航天器和行星的位置向量之间的角度接近无效的值时,估计误差会降低。在双行星观察方案中,当两个LOS方向之间的分离角接近90时,估计误差会降低。对性能的主要影响是由测量误差驱动的,当前技术被证明能够以几百公里的顺序提供位置误差,而较低的测量误差(0.1 ARCSEC)可能在100 km以下的位置误差。最后,可以证明跟踪频率在性能中起次要作用,并且只有在收敛时间明显地影响。2022 cospar。由Elsevier B.V.这是CC下的开放访问文章(http://creativecommons.org/licenses/4.0/)。

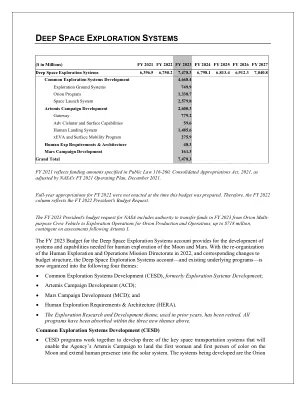
美国宇航局的深空探索计划
月球到火星架构 为了成功实现人类在深空的持久存在,NASA 战略性地优先考虑硬件开发,首先是该机构广受认可的探索蓝图及其支持性的月球到火星目标,这些目标是在世界各地专家的意见下制定的。每个目标都通过系统工程流程分解,得出架构元素,例如火箭、航天器、探测器、宇航服、通信中继等,这些元素将逐步开发并运送到月球和火星,以进行长期的、人类主导的深空科学发现。架构本身由多个部分组成,NASA 可以将架构分解为易于管理的部分,以集中和优先考虑其分析工作并与合作伙伴进行协调。架构各个部分 — 人类重返月球、基础探索、持续月球演化和人类登陆火星 — 如下所述。

深空栖息地的人工重力产生
随着人类将目光投向深空探索和长期太空任务,航天器和太空栖息地对人工重力的需求也变得越来越迫切。长时间暴露在微重力环境中会导致一系列生理问题,包括肌肉萎缩、骨密度降低和体液重新分布。这些有害影响对执行数月甚至数年任务的宇航员的健康和福祉构成了重大挑战。本综述探讨了深空栖息地人工重力产生的当前研究,研究了可能实现可持续人工重力环境的挑战、技术和潜在解决方案。我们讨论了离心方法(例如旋转栖息地)和非离心方法(包括电磁场和静电场)。此外,我们还强调了操作和工程限制,以及可能解决这些障碍的未来发展潜力。
深空探索与开发的新时代
要实现这一愿景,需要一个有利于美国商业增长的安全国际环境。美国太空部队 (USSF) 本身并不直接参与民用太空探索和开发,其职责主要集中在组织、培训和装备所需的部队,以支持作战指挥并确保美国及其盟友和合作伙伴不受限制地进入和使用太空。然而,太空运输和物流、电力、通信、导航和太空领域意识等活动对所有太空领域(民用、国家安全和商业)都具有双重用途价值。民用和商业最佳实践的发展可以形成负责任的行为规范,从而提高所有太空活动的国际稳定性和透明度。美国国务院、国防部、商务部、交通部、能源部和国土安全部在太空探索和开发中发挥的重要支持作用是美国采取全政府方式开展太空活动的主要原因之一。