XiaoMi-AI文件搜索系统
World File Search System湍流
过渡湍流和充分发展湍流中的随机性
我们已经写出了水流方程。从实验中,我们找到了一组概念和近似值来讨论解决方案——涡街、湍流尾流、边界层。当我们在不太熟悉的情况下遇到类似的方程,并且还不能进行实验时,我们会尝试以一种原始、停滞和混乱的方式求解方程,以确定可能出现哪些新的定性特征,或者哪些新的定性形式是方程的结果。

使用湍流通量测量表征大气光学湍流
通过大气传播的光传播沿传播路径的反射指数(称为光湍流)影响。在大气表面层中,这些波动主要是由于温度和湿度变化的湍流混合。为了提高对光学湍流的理解和预测,提出了塞文河上方大气表面层的表征。气象数据是从传感器阵列中收集的,其中包括位于马里兰州Annapolis的滨水区准备盆地(38.98n,76.46W)的两个声音动态计和一个红外气体分析仪(IRGASON)(IRGASON)。这些仪器的位置位于水线上最多8米的距离上,以分析边界层的预测。阵列安排以优化仪器灯芯上的气流。使用风速,温度,压力和其他参数等特征,可以使用几种不同的方法来计算温度,湿度和折射率的结构参数。这些结构参数是估计激光传播的湍流效应的主要手段。可以从领域数据,诸如hu虫山谷(HV5/7)等湍流漏洞的评估或可以验证恒定的浮标层缩放(Monin-Obukhov)。本文介绍了有关设置,校准,传感器套件的安装以及收集数据的早期发现的工作。
军用飞机湍流类别
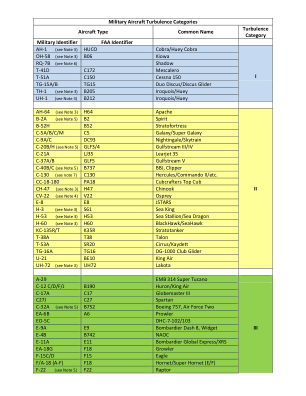
注 1:本表中的湍流类别是根据翼展、翼面积、纵横比、锥度比、机翼后掠角等飞机因素得出的。因此,应将本表视为权威;但是,飞机的重量、空速和/或高度可能会改变其湍流类别,使其与本表中的默认值不同。原始源文件为 AFWAL-TR-81 3058。如需更新和飞机补充,请联系 AFLCMC/XZIG,DSN 785- 2299/2310。注 2:如果未列出飞机,可以进行以下保守湍流类别划分:在 FL180 或以上飞行的喷气式飞机和多引擎螺旋桨/涡轮螺旋桨飞机可视为 II 类。所有其他飞机都应视为 I 类。注 3:直升机的湍流类别主要根据机组人员的反馈确定。由于直升机的复杂性增加,固定翼飞机所用的方法不适用于直升机。注 4:CV-22 显示的飞行方面包括旋翼机翼操作,因此无法对旋翼飞行阶段(例如起飞/降落)进行客观阵风载荷计算和湍流分类。


具有两个预后湍流能量的湍流方案的稳定数值实现
摘要:在本文中,我们提出了对三阶矩矩的两能量配置的新的,更稳定的数值实现,并提出了统一的凝结和N依赖性求解器(TOUCAN)湍流方案。toucans中的原始时间稳定方案往往会遭受稳定的地层湍流中的虚假振荡。由于它们的高频,振荡类似于由湍流交换系数与稳定性参数之间的耦合引起的所谓纯正。但是,我们的分析和仿真表明,两能方案中的振荡是由使用特定隐式的使用 - 对放松条款的明确时间离散化引起的。在Toucans中,放松技术用于预后湍流能量方程中的源和耗散项,以确保相对较长的时间步长的数值稳定性。我们既提出了详细的线性稳定性分析和分叉分析,这表明时间步骤超过关键时步长度的时间步骤是振荡的。基于这些发现,我们提出了有关涉及条款的新负担得起的时间离散化,以使计划更具隐式。这可以确保具有足够精度的稳定解决方案,以实现更广泛的时间步长。我们确认了理想化的1D和完整3D模型实验中的分析结果。
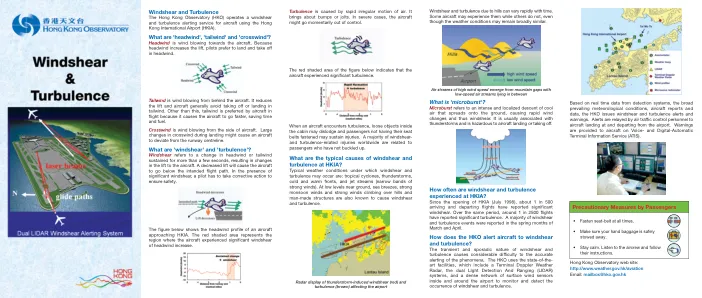
风切变和湍流什么是“逆风”、“顺风”和……
本刊物所载的所有内容,包括但不限于所有数据、地图、文字、图像、图画、图表、照片、影片及数据或其他资料的汇编(统称“资料”)均受香港特别行政区政府(统称“政府”)所拥有或该等资料的知识产权拥有人已授权政府处理该等资料,以作本刊物所载的所有用途。资料作非商业用途时,须遵守“香港天文台刊物内资料作非商业用途使用条件”(可于以下网址查阅:https://www.hko.gov.hk/en/publica/non-commercialuse.htm)所列的所有条款和条件。此外,除非符合《香港天文台刊物内资料商业用途使用条件》(可于 https://www.hko.gov.hk/en/publica/commercialuse.htm 找到)所列的所有条款及条件,并取得香港天文台(下称“天文台”)代表政府的事先书面授权,否则严禁将资料用作商业用途。如有查询,请以电邮(mailbox@hko.gov.hk)或传真(+852 2311 9448)或邮寄方式与天文台联络。
湍流射流的人工智能控制
开发了一种人工智能 (AI) 控制系统,以最大限度地提高湍流喷射的混合率。该系统由六个独立操作的非稳定微型喷射执行器、两个放置在喷射器中的热线传感器和用于无监督学习近乎最优控制律的遗传编程组成。该定律的假设包括多频率开环强迫、传感器反馈及其非线性组合。混合性能通过喷射中心线平均速度的衰减率来量化。有趣的是,人工智能控制的学习过程按性能提高的顺序逐一发现了传统控制技术可实现的经典强迫,即轴对称、螺旋和拍打,最终收敛到迄今为止未探索过的强迫。仔细检查控制环境可以揭示学习过程中产生的典型控制定律及其演变。最佳 AI 强制产生复杂的湍流结构,其特点是周期性生成的蘑菇结构、螺旋运动和振荡射流柱,所有这些都提高了混合率并且远远优于其他结构。这种流动结构以前从未被报道过,我们从各个方面对其进行了检查,包括速度谱、平均和波动速度场及其下游演变,以及三个正交平面中的流动可视化图像,并与其他经典流动结构进行了比较。除了对微射流产生的流动及其对主射流初始条件的影响的了解之外,这些方面还为我们了解这种新发现的流动结构高效混合背后的物理原理提供了宝贵的见解。结果表明,人工智能在征服许多执行器和传感器的控制律的巨大机会空间以及优化湍流方面具有巨大潜力。

高速风中的湍流测量...
Matthew R. Fulghum 的论文经过以下人员的审阅和批准*:机械工程学教授 Gary S. Settles 论文顾问 委员会主席机械工程与数学杰出教授 Asok Ray 机械工程学教授 John M. Cimbala 机械工程学教授 Philip J. Morris Boeing/A. D. Welliver 航空航天工程学教授 Daniel C. Haworth 机械工程学教授 MNE 研究生项目主管教授 * 签名已存档于研究生院。

湍流边界层的气动光学畸变
四个直接数值模拟 (DNS) 数据集涵盖了 8 至 14 的有效自由流马赫数,用于研究高超音速边界层中湍流引起的气动光学畸变行为。数据集包括两个来自平板边界层(马赫数 8 和 14)的模拟数据集和两个来自尖锥流(马赫数 8 和 14)的模拟数据集。来自每个 DNS 的瞬时三维密度场被转换为折射率并进行积分以产生由湍流引起的光程差 (OPD) 分布。然后将这些值与文献中的实验数据和现有的 OPD 均方根模型进行比较。虽然该模型最初是为马赫数 ≤ 5 的流动开发的,但它为我们比较高超音速数据提供了基础。

湍流边界层的气动光学畸变
研究了湍流引起的亚音速、超音速和高超音速边界层的气动光学畸变特性。使用了四个边界层的直接数值模拟 (DNS) 数据,这些边界层的标称马赫数范围从 0.5 到 8。亚音速和超音速边界层的 DNS 数据是平板流。两个高超音速边界层均来自入口条件为 8 马赫的流动,其中一个是平板流,另一个是尖锥上的边界层。这些数据集中的密度场被转换为折射率场,这些折射率场沿预期的光束路径积分,以确定光束穿过湍流场的折射时将经历的有效光程长度。然后,通过考虑与体边界层效应相关的平均路径长度和倾斜问题,确定光程差 ( ) 的分布。将 的均方根与现有模型进行比较。发现从亚音速和超音速数据确定的 值与现有模型非常匹配。可以预料的是,由于在模型推导过程中做出了强雷诺类比等假设,高超音速数据匹配得并不好。到目前为止,该模型从未与本文中包含的马赫数如此之高的流动或流过尖锥几何的流动进行比较。