XiaoMi-AI文件搜索系统
World File Search System滑行
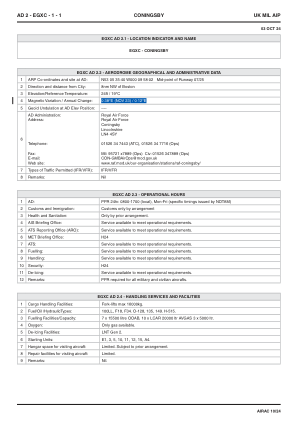
AD 2 - EGXC - 1 - 1 英国军用 AIP 科宁斯比
1. 航线 - 1000。跑道 07 - RHC。2. RHAG 插图:a. 跑道 07 - 1300 英尺 b. 跑道 25 - 1300 英尺 标准电缆配置为进近端电缆向下,超限电缆向上。至少需要提前 10 分钟通知才能安装进近端电缆。3. 翼展大于 14 米的飞机将接受特殊滑行指令。4. 起落架照明系统距跑道 33 英尺。5. 为减少 RTF,机场管制员不会向在目视航线内飞行且相关飞机处于相同尾流湍流类别的飞行员发送“小心,尾流湍流”信息。
飞机事故调查和调查委员会
2021 年 6 月 3 日 11:15 左右,一架德事隆航空公司赛斯纳 U206B 型飞机(注册号为 RP-C979)在苏比克机场中途停机坪 E1 滑行时发生滑行偏离,途经 E2 – C – 南航站楼区域提交飞行计划。事件发生在菲律宾三描礼士苏比克湾国际机场 (RPLB) SBMA FPZ。该飞机由巴坦群岛航空服务公司运营,执行公司通用航班。飞行员安全撤离,飞机没有损坏。事发时目视气象条件良好。飞机被推回中途停机坪并进行了进一步评估。


使用直接聚变驱动器探索海王星外天体
直接聚变驱动器 (DFD) 是一种核聚变发动机,可为任何航天器产生推力和电力。它是一种紧凑型发动机,基于 D-3He 无中子聚变反应,使用普林斯顿场反转配置进行等离子体约束,并使用奇偶校验旋转磁场作为加热方法实现聚变。推进剂是氘,它被聚变产物加热,然后膨胀到磁喷嘴中,产生排气速度和推力。根据任务要求,单个发动机的功率范围可以在 1 - 10 MW 之间,并且能够实现 4 N 至 55 N 的推力,具体取决于所选功率,比冲约为 10 4 s。在这项工作中,我们介绍了使用这种发动机到达和研究太阳系外边界的可能性。目标是在不到 10 年的时间内,携带至少 1000 公斤的有效载荷,前往柯伊伯带及更远的海王星外天体 (TNO),如矮行星鸟神星、阋神星和鸟神星,从而可以执行从科学观测到现场操作等各种任务。所选的每个任务剖面图都尽可能简单,即所谓的推力-滑行-推力剖面图,为此,每个任务分为 3 个阶段:i. 从低地球轨道逃离地球引力的螺旋轨迹;ii. 行星际旅行,从离开影响区到滑行阶段结束;iii. 机动与矮行星会合。图中给出了每次机动的推进剂质量消耗、初始和最终质量、速度和 ∆ V。轨迹分析针对两种情况进行:简化场景,其中 TNO 在黄道平面上没有倾斜,真实场景,其中考虑了真实的倾斜角。此后,研究了多种场景,以达到 125 AU,以便研究太阳磁层的外部边界。我们的计算表明,由 DFD 推进的航天器将在有限的时间内以非常高的有效载荷与推进剂质量比探索太阳系的外部边界,开辟前所未有的可能性。

Jagdeep Dhankhar 当选 没有新一批
医院,而其他四人则被转移到斯利那加医院接受进一步治疗。不幸的是,另外两名士兵在去医院的途中因伤势过重而死亡。其余两人情况危急。” 已确定死亡士兵分别是 Lance Naik Jitender、Havildar Hari Ram、Gunner Nitesh 和 Pawan Kumar。受伤士兵是 Havildar Balappa 和 Lance Naik Garili。陆军说,事故是由于恶劣的天气和能见度低造成的。在一份声明中,印度陆军军团向遇难者家属表示沉痛的哀悼,并对当地克什米尔公民在救援行动中迅速提供帮助表示感谢。 “2024 年 1 月 4 日,在班迪普奥拉区执行任务时,印度陆军的一辆车在侧滑行 P-06

跨境投资 - 亚洲地区整合中心
经过2年的持续增长,合并和收购(并购)的交易收入,在2022年滑行。区域内和区域外收购值的价值下降了约30%(图3.2a)。不确定的经济环境,高价和增加的利率加剧了这一趋势。同时,格林菲尔德投资在2022年进一步扩大,包括非亚洲来源,尽管投资环境充满挑战,但仍显示出韧性。该地区的Greenfield项目在2022年增长了79%,区域内格林菲尔德投资增长了54%。在2022年,内向投资的另一个特征是大量的大型项目(超过10亿美元的资本投资)。在2022年在亚洲总共有41个报告,主要集中在高科技制造领域,例如半导体和服务领域,例如可再生能源。

基于... 的无人机周期控制
如今,无人机 (UAV) 的飞行距离越来越长,任务时间也显著延长。这要求无人机不仅要有长续航能力,还要有远程能力。受鸟类和海洋动物运动模式的启发,它们表现出动力-滑行-动力周期性运动行为,因此提出了一个最优控制问题来研究无人机轨迹规划。微分平坦度的概念用于将最优控制问题重新表述为非线性规划问题,其中平坦输出使用傅里叶级数参数化。P 检验还用于验证是否存在优于稳态运动的周期解。以航空探空仪无人机为例,说明周期性控制方案相对于平衡飞行在续航时间和航程成本方面的改进。[DOI: 10.1115/1.4043114]

LFRM - 勒芒赛事
一般信息 20.1 一般信息 20.1 AD 为配备无线电的 ACFT 保留。 AD 为配备无线电的设备保留。除跑道和跑道以外,禁止滑行。禁止在跑道 (RWY) 和跑道 (TWY) 外驾驶。禁止同时使用两个跑道。禁止同时使用两条轨道。避免飞越 Arnage。避免飞越 Arnage。出发时: - - 当 RVR < 800 m:照明和跑道保护灯打开时,只有 A 通道可用,如果 RVR < 800 m:照明和跑道保护灯打开时,只能使用坡道 A, - - 如果 RVR < 550 m:照明和跑道保护灯打开时,只能使用坡道 A,并且在机动区每次只能移动一个物体。

高强度螺栓的流体动力压力与结构载荷...
开发了高速双体船和 SES 船体形态的航道动态响应理论和工程模型,并将其应用于相关配置。零重力半滑行理论最初用于平静水域分析和航道动力学。从这项初步工作中得出结论,虽然相关大型船舶的典型工作弗劳德数很高(略高于 1),但可能还不足以证明在流体动力学中忽略重力的影响。当时的主要努力是将重力纳入流体动力学,无论是在平静水域作业还是在波浪中。发现 Mauro“平船”理论可作为此扩展的基础。通过将扩展代码的计算结果与 1970 年代在加利福尼亚州圣地亚哥旧洛克希德坦克上对 Bell-Halter110 SES 进行的模型实验进行比较,证明了这一发展。
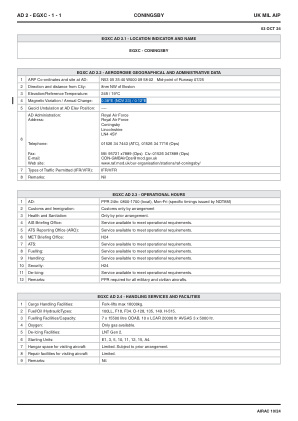
AD 2 - EGXC - 1 - 1 英国军用 AIP 科宁斯比
1. 航线 - 1000。跑道 07 - RHC。2. RHAG 插图:a. 跑道 07 - 1300 英尺 b. 跑道 25 - 1300 英尺 标准电缆配置为进近端电缆向下,超限电缆向上。至少需要提前 10 分钟通知才能安装进近端电缆。3. 翼展大于 14 米的飞机将接受特殊滑行指令。4. 起落架照明系统距跑道 33 英尺。5. 为减少 RTF,机场管制员不会向在目视航线内飞行且相关飞机处于相同尾流湍流类别的飞行员发送“小心,尾流湍流”信息。