XiaoMi-AI文件搜索系统
World File Search System漂浮
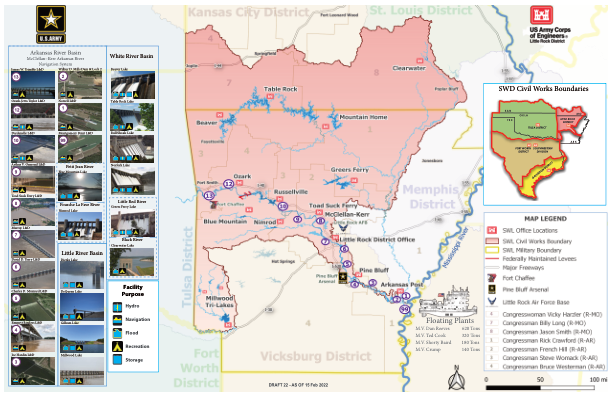
漂浮植物 - 小石城地区
- 1.09 亿美元用于实际完成和财务收尾三河项目 - 8500 万美元用于运营和维护(MKARNS、Bull Shoals、Norfork、Clearwater) - 970 万美元用于持续授权计划

微生物在空气中漂浮
尽管没有显微镜的帮助,我们看不到它们,但在地球上的每个环境中都发现了微生物,包括海洋,土壤,森林,冰川,冰川和空气中,我们都呼吸。空气中微生物的数量和多样性取决于您位于地球上的位置。例如,与站在城市中间相比,站在北极的冰川上时,您的空气传播微生物呼吸少。微生物,它们自己移动或附着在灰尘颗粒上。灰尘颗粒可能来自汽车排气和工业污染之类的东西。空气中的微生物具有各种形状(圆形,杆状或弦形),并且可以包括许多不同种类的细菌,真菌和藻类。考虑所有不同种类的鸟类,它们的各种尺寸,形状和生活方式,然后想象空气中的微生物也是如此。每天,您最多吸入15,000升空气,其中包含数百万个属于数千种不同物种的机载微生物。

漂浮海洋垃圾运输的物理海洋学
Erik van Sebille 1 , Stefano Aliani 2 , Kara Lavender Law 3 , Nikolai Maximenko 4 , José M Alsina 5 , Andrei Bagaev 6 , 7 , Melanie Bergmann 8 , Bertrand Chapron 9 , Irina Chubarenko 6 , Có 和 Có i 1 ,菲利普米 1 , 马蒂亚斯·埃格 11 , 贝勒·福克斯-肯珀 12 , Shungudzemwoyo P Garaba 11 , 14 , Lonneke Goddijn-Murphy 15 , 布里塔·丹尼斯·哈迪斯蒂 16 , 马修·J·霍夫曼 17 , Atsuhiko Isobe 18 , Cleo E Jongedi 19 , 米凯尔·安多尔 19 Liliya Khatmullina 6 , Albert A Koelmans 20 , Tobias Kukulka 21 , Charlotte Laufkötter 22 , Laurent Lebreton 11 , Delphine Lobelle 1 , 23 , 24 , Christophe Maes 9 , 25 , Victor Martinez-Vic 26 , Miles Angda Maguelquel 27 , 玛丽·普兰-扎科斯 28 , 29 , 埃内斯托·罗德里格斯 30 , 彼得·G·瑞恩 31 , 艾伦·L·尚克斯 32 , 元俊沉 33 , 朱塞佩·苏亚利亚 2 , 马丁·蒂尔 34 , 35 , 36 , 托恩·S37 和 大卫·范·布雷默 1

为 In-... 建立受控漂浮空间机器人的建模
机器人和自主系统 (RAS) 的地面应用正在快速发展,人们越来越希望开发具有成本效益的 RAS 解决方案,用于现场维修、碎片清除、制造和装配任务。轨道空间机器人,即安装有一个或多个机器人操纵器的航天器,是未来一系列在轨服务的必然系统。然而,与地面机器人相比,各种实际挑战使得控制空间机器人极其困难。研究人员已经对在自由飞行和自由浮动模式下运行的空间机器人的运动学和动力学建模的最新进展进行了深入研究。然而,这两种操作模式有各种缺点,可以通过在受控浮动模式下操作空间机器人来克服这些缺点。本教程旨在解决在受控浮动模式下和受扰条件下运行的复杂空间机器人建模方面的知识差距。本文的创新研究贡献是改进了追踪空间机器人的动力学模型,该模型针对移动目标而建立,同时考虑了耦合系统的质心、惯性矩阵、科里奥利力和离心项不断变化的内部扰动;它还考虑了外部环境干扰。所提出的非线性模型准确地表示了空间机器人的多体耦合动力学,这对于精确的姿势控制至关重要。所给出的仿真结果证明了闭环控制模型的准确性。除了数学建模方面的理论贡献外,本文还为各种在轨任务提供了商业上可行的解决方案。
基于导航雷达回波视频数据的占据栅格地图构建方法
摘 要 : [ 目的 ] 为解决无人艇的船载导航雷达对养殖区 、 浮筒 、 小型漂浮物等海洋漂浮障碍物感知效果不 佳的问题 , 提出一种基于导航雷达回波视频数据构建与更新的占据栅格地图的环境感知方法。 [ 方法 ] 首 先 , 采用多级集合的形式描述雷达点迹与回波点间的包含关系 , 为栅格地图构建奠定基础 , 期间 , 基于群相邻 关系对近邻点迹进行凝聚 , 抑制目标分裂导致的航迹偏差 ; 然后 , 利用所提的基于自然对数函数的占据栅格 地图概率更新算法 , 通过合理利用历史数据区分海杂波与微小海洋漂浮障碍物 ; 最后 , 建立基于点迹属性的 栅格地图概率扩散模型 , 以较好地保证典型动态目标占据栅格更新的实时性。 [ 结果 ] 实船试验结果表明 , 所提方法可准确获取养殖区 、 浮筒等成片海洋漂浮障碍物的轮廓信息 , 抑制目标分裂现象 ; 与经典方法相比 , 所提方法对干舷 0.5 m 的小型漂浮物首次发现距离提升了 78.34 m , 定位精度提升了 1.42 m 。 [ 结论 ] 所提方 法能够实现对多种海洋漂浮障碍物 、 海面运动目标的准确感知 , 确保无人艇航行安全。
开发港口网络的影响,用于在美国西海岸漂浮海上风能
开发一个港口系统,可以在美国西海岸实现商业规模的浮动海上风能开发,将需要政府,工业,港口当局和当地社区之间进行大量投资和协调。策略性地计划这些资源的关键第一步是了解支持离岸风能项目开发的不同阶段所需的港口(以及相关投资)的数量,包括制造,安装和运营。,但是简单地提高这些成本不足以了解强大的港口网络如何影响当地社区,环境,劳动力发展,海上风能行业以及整个西海岸地区。决策者应考虑有关这些潜在影响的更广泛的信息,以了解战略投资如何使西海岸浮动海上风能港口网络的最有益结果。

用于在轨服务的具有柔性附件的旋转漂浮空间机器人的控制
由于很难获得柔性动力学,因此提出了对未知扰动具有鲁棒性的控制器 [6]。在机械手操纵过程中实现姿态控制仍然是一项具有挑战性的任务,因为除了外部扭矩/力之外,机械手运动和附加物振动也可能导致不良的底座旋转。已经研究了通过工作空间调整策略 [7] 或同时控制全局质心和航天器姿态 [8] 来有效使用推进器来补偿机械手运动。同样,当仅控制机械手时,已经开发了反应零空间控制以减少机械手和航天器底座之间的相互作用 [9]。由于振动部分是由于机械手运动引起的,因此基于机械手刚体动力学和附加物柔性动力学之间的耦合因素,已经提出了一种控制策略来抑制振动 [10] 或优化机械手轨迹以最大限度地减少底座扰动 [11]。此外,未来的任务预计会有更长的寿命。除了飞行空间机械手的高效推进剂消耗策略外,一个有意义的延长寿命的方法是使用带电气的动能矩交换装置,这种装置被称为旋转自由浮动航天器机械手[12]。利用动能矩交换装置的优点来控制机械手引起了人们对处理相对较大质量和惯性的操纵的兴趣,比如在捕获或部署场景中。通过运动学指标,在控制机械手的同时控制航天器姿态可以提高其可操纵性[13]。已经研究了结合反作用轮和控制力矩陀螺仪来在机械手运动期间保持卫星平台固定[14]。本文旨在开发在轨部署应用中在结构扰动下航天器底座和机械手的通用控制。在考虑不同机械手配置的系统动量分布时,开发通用控制的兴趣凸显出来 [13]。本文的贡献在于将柔性动力学与刚性动力学相结合,从而可以开发扩展状态观测器来改善控制性能,而不是刚性系统的未知扰动观测器 [6]。然后使用 NDI 对系统进行解耦和线性化,包括对振动扰动和航天器漂移的估计。此外,还针对实际的大尺寸系统开发了控制律和观测器的综合。

用于在轨服务的具有柔性附件的旋转漂浮空间机器人的鲁棒控制
线性和角航天器动力学。已经针对捕获应用进行了研究,因为潜在的翻滚目标需要经过调整的机械手方法。通过 Giordano 等人 (2018) 提出的工作空间调整策略或 Giordano 等人 (2019) 同时控制全局质心和航天器姿态,已经研究了如何有效使用推进器来补偿机械手运动。同样,当仅控制机械手时,Pisculli 等人 (2015) 开发了反应零空间控制,以减少机械手和航天器底座之间的相互作用。还可以注意到没有考虑底座执行器的情况。更一般地说,轨迹规划被认为可以减少机械手运动和/或外部干扰对底座的影响,至少对于无奇点轨迹而言。Rybus 等人采用了非线性模型预测控制。 (2017) 确保机械手实现优化轨迹,最大限度地减少机械手对卫星的干扰,同样在捕获接近阶段,Lu 和 Yang (2020) 研究了笛卡尔轨迹规划,以最大限度地减少姿态干扰,Seddaoui 和 Saaj (2019) 提出了一种用于燃料消耗优化的无碰撞路径和无奇点路径的通用轨迹规划,同时采用 H ∞ 控制和前馈补偿处理内部和外部扰动。

在中央大西洋超过超过的水域中漂浮海上风能的挑战和机会
AHTS anchor handling tug supply (vessel) API American Petroleum Institute Area ID Area Identification BOEM Bureau of Ocean Energy Management BSEE Bureau of Safety and Environmental Enforcement COP Construction and Operations Plan CTV crew transfer vessel CVOW Coastal Virginia Offshore Wind DNREC Delaware Natural Resources Environmental Control DOE U.S. Department of Energy EIA U.S. Energy Information Administration ft feet GW gigawatt HVDC high-voltage direct current IEC International Electrotechnical Commission km kilometer LCOE levelized cost of energy m meter mi mile m/s meters per second MW megawatt NOAA National Oceanic and Atmospheric Administration NOW-23 2023 National Offshore Wind data set NOWRDC National Offshore Wind Research and Development Consortium NREL National Renewable Energy Laboratory OCS Outer Continental Shelf OREC Offshore Renewable Energy Credit PSN Proposed Sale Notice ROD Record of决定第二个SAP站点评估计划WEA风能区WTIV风力涡轮机安装船

直径 5 微米的针状电极漂浮在组织上,用于小鼠减少损伤的慢性神经元记录
完整作者列表: Yamashita, Koji;丰桥技术科学大学电气和电子信息工程系 Sawahata, Hirohito;国立技术学院茨城学院 Yamagiwa, Shota;丰桥技术科学大学电气和电子信息工程系 Yokoyama, Shohei;TechnoPro, Inc.,TechnoPro R&D,公司 Numano, Rika;丰桥技术科学大学电子学跨学科研究所 (EIIRIS);丰桥技术科学大学应用化学与生命科学系 Koida, Kowa;丰桥技术科学大学电子学跨学科研究所 (EIIRIS);丰桥技术科学大学计算机科学与工程系 Kawano, Takeshi;丰桥技术科学大学电气和电子信息工程系