XiaoMi-AI文件搜索系统
World File Search System漫游
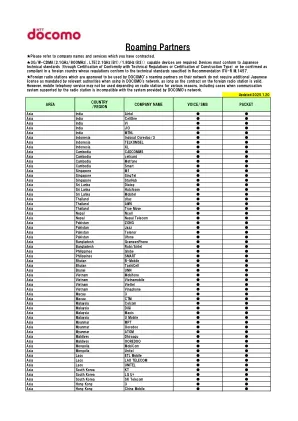
漫游合作伙伴
Asia India AIRTEL ● ● Asia India Cellone ● ● Asia India VI ● ● Asia India Jio ● ● Asia India MTNL ● ● Asia Indonesia Indosat Ooredoo/3 ● ● Asia Indonesia Telkomsel ● ● Asia Indonesia XL ● ● Asia Cambodia CadComms ● MetFone●●亚洲柬埔寨智能●●Asia Singapore M1●●Asia Singapore Singtel●●Asia Asia Singapore Starhub●●ASIA SRI LANKA对话●●ASIA SRI LANKA HUCHA HUCTISON●●移动●●亚洲尼泊尔NCELL●●亚洲尼泊尔尼泊尔尼泊尔电信●●●●巴基斯坦Zong Zong●●●●●●●●●●●●●●●●●●●●●●●●●●●●ASIA BAKISTAN BAKISTAN BAKISTAN BAKISTAN BAKISTAN UFONE●●亚洲菲律宾智能●●亚洲不丹b-Mobile●●亚洲不丹·塔西塞尔●●亚洲brunei unn●●●●亚洲越南竞赛●●●●亚洲越南越南人●●●亚洲越南越南越南越南越南vietnam vietnam vinem●亚洲vinem● Malaysia Celcom ● ● Asia Malaysia Digi ● ● Asia Malaysia Maxis ● ● Asia Malaysia U Mobile ● ● Asia Myanmar MPT ● ● Asia Myanmar Ooredoo ● ● Asia Myanmar Atom ● ● Asia Maldives Dhiraagu ● ● Asia Maldives Ooredoo ● Laos Etl Mobile ● ● Asia Laos Lao Telecom ● ● Asia Laos United ● ● Asia South Korea KT ● ● Asia South Korea LG U+ ● ● Asia South Korea SK Telecom ● ● Asia Hong Kong 3 ● ● Asia Hong Kong China Mobile ● ●

具有漫游地形的漫游车导航的经验
引言月球的诱惑很强 - 人类再次应对挑战。一个有前途的近期场景是将一对流浪者降落在月球上,并参与多年1000公里的历史景点,包括阿波罗11号,测量师5,游侠8,阿波罗17和Lunokhod 2 [6]。在这种情况下,流浪者将以自主或保护的监督控制模式进行操作,并将其周围环境的连续实时视频传输到地球上的操作员。虽然这种任务的硬件方面令人生畏 - 电源,热,通信,机械和电气可靠性等。- 软件控制方面同样具有挑战性。特别是,流动站需要能够在各种地形上行驶并维护其操作的能力。以前的行星机器人(尤其是Lunokhod 2和Viking的手臂)的经验说明了远程操作员的费力和不可预测的时间延迟的漫画。更好的操作模式是监督远程运行,甚至是自动操作,其中流动站本身负责做出许多维持进度和安全所需的决定。我们已经开始了一项计划,以开发和演示技术,以在月球般的环境中启用远程,保护的远程操作和自动驾驶。特别是,我们正在研究立体声的技术
映射和对象的自主漫游器...
在这个综合项目中,我们旨在增强建立在4轮底盘上的避难系统,利用Arduino,Raspberry Pi 3B,Tensorflow Lite和RP Lidar A1的组合。这些组件的集成创建了一个精致的机器人系统,能够智能决策,对象检测和连续的两维映射。使用伺服电动机的超声传感器进行了伺服电机的超声传感器,以实时检测机器人路径中的障碍物,这是基本的避免系统的基础避免系统。这个简单且具有成本效益的解决方案提供了导航的初始层,从而通过避免碰撞来确保机器人可以在动态环境中操纵。为了提升系统的功能,我们引入了Raspberry Pi 3B,作为操作的大脑。连接到USB摄像机,Raspberry Pi利用Python中的Tensorflow Lite库进行对象检测和识别。此添加使机器人能够在其周围环境中识别和分类对象,从而增强其根据视觉输入做出明智决策的能力。目标:
ng.145 Mission关键通信漫游...
Mission关键服务已由3GPP定义,并且自发行版本开始以来的规格已增长。从那以后,人们认识到公共安全机构(PSA)通过利用新技术来增强任务关键沟通能力,即LTE无线电访问技术,增强的MBM(多媒体广播/多播服务),IP多媒体子系统(IMS)平台以及新的5G服务集。导致任务关键宽带网络的发展,使Mission Critical Communications除了语音外交换多媒体内容并获得了移动宽带访问的好处;还允许将关键沟通扩展到社会和行业的部门,而不是最典型的关键通信用户,即所谓的“蓝灯”机构(警察,救护车和消防队)。


开发空间探索漫游车数字双胞胎损坏检测
近年来,太空探索工作越来越集中于对火星和月球等行星和卫星的表面探索。这是通过使用流浪者来实现的,流浪者能够跨天体旅行并进行研究活动。但是,完成任务可能具有挑战性,必须及时解决问题,以避免丢失Sciminific Data甚至Rover本身。鉴于与火星(Olson,Matthies,Wright,Li,&di)的有限通信能力,必须迅速检测到异常,因为没有现场人工干预的可能性。要面对这个问题,NASA分别开始开发其漫游者的物理双胞胎,例如对好奇心和毅力的乐观情绪(Cook,C。,Johnson和Hautalu-Oma)(Castelluccio,)。同时,NASA和西门子研究了一个好奇的数字双胞胎,以使用SIM-DIOSOTOPE热电学发电机(MMRTG)使用SIM-Center 3D(M.I.T.,M.I.T.,)分析和解决由多损耗ra-Dioasotope热电学发电机(MMRTG)引起的散热问题。同样,欧洲航天局
大型业务的EE价格指南
所有服务计划和服务计划附加组件(除非本价格指南或您的合同中另有说明)将允许用户在2017年6月15日在Home(“ RLAH”)中漫游EE业务区域1和2时在EE Business 1和2中漫游时,使用其英国津贴 /定价结构(语音,SMS和数据)。请注意,英国的电话1&2和EE商务旅行区1&2的漫游电话向EE商务旅行区3-7的漫游电话不包括在RLAH的范围内,并以标准费率收取。但是,为了有资格获得RLAH,不得将连接用于永久漫游,并且必须满足特定的标准。有关更多详细信息,请参见本价格指南的第9节。
大型业务的EE价格指南
所有服务计划和服务计划附加组件(除非本价格指南或您的合同中另有说明)将允许用户在2017年6月15日在Home(“ RLAH”)中漫游EE业务区域1和2时在EE Business 1和2中漫游时,使用其英国津贴 /定价结构(语音,SMS和数据)。请注意,英国的电话1&2和EE商务旅行区1&2的漫游电话向EE商务旅行区3-7的漫游电话不包括在RLAH的范围内,并以标准费率收取。但是,为了有资格获得RLAH,不得将连接用于永久漫游,并且必须满足特定的标准。有关更多详细信息,请参见本价格指南的第9节。
2024西开普保护状态报告
西开普省灭绝的哺乳动物的数量已从6下降到5-而不是通过基因编辑技术探索,而是通过对博物馆标本的分析来复活丢失的物种。结果表明,用来漫游扁平角的草原的狮子仅在欧洲殖民者消除之前与柜台隔离的短时间隔离。和最初理解的遗传学上没有差异(de Flamingh等人。2024)。在西开普省,可以在卡鲁国家公园和私人物业上找到自由漫游狮子。