XiaoMi-AI文件搜索系统
World File Search System现实性
视听生成AI和冲突解决
恶意演员采用生成的AI技术仍然有限。但是,随着意识和能力的发展,我们希望许多利益相关者都有不同动机的动机。尤其是,我们预见到恶意的演员将继续利用公众在区分真实和虚假内容方面的困难,在复杂形式的欺骗形式的帮助下,例如合成谎言的嵌套和构成深层蛋糕的嵌套,从而使AI生成的输出在内容的层面中建立在内容的层面中,这些层次有助于构建一个构造的叙述性叙事,但构造了构造的叙事。确实,生成AI确实有可能显着增强恶意演员的能力,从而使他们能够有效地产生更高的现实内容,但现有的大部分分析仍然限于在线合成内容的数量或现实性的问题。但是,即使是在关键时刻有效的有效目标,也可能会播种损害的可能性,即使是在关键时刻有效的目标,尤其是在有效的目标时,尤其是针对性的AI含量。

接近零数介质作为电磁理想流体
2 /𝑎1,带有𝑎1= 2.5×2 = 0.8 𝜆 𝜆。所有波导壁都被视为PEC边界,而𝜆 𝜆是NZI频率下的自由空间波长。(b) - (d)时间平均poynting载体场(𝐒𝐒,功率流)的实际部分的幅度和矢量图,将其标准化为其入射对应物,对于(b)𝛿 = 0(b)𝛿 = 0(无损耗),(c)𝛿 = 0.01,和(d)𝛿 = 0.1。这些数值结果表明,功率流的幅度在有损耗的EMNZ介质中表现出指数衰减。然而,归一化的矢量分布在耗散阻尼的情况下具有鲁棒性,并且在此处研究的参数范围内保留了涡度的不存在。所考虑的损失因素是NZI介质的超材料实现的现实性,包括色散波导和全dielectric光子晶体,以及一些最高质量的连续培养基,例如硅碳化硅(SIC),其特征在于𝜀 =𝑖=𝑖0.03。但是,基于掺杂的半导体的其他实现(例如基于掺杂的半导体)表现出更高的损失𝜀 = 𝑖0.2〜0.5。

BEHAVIOR-1K:具有 1,000 个日常活动和现实模拟的具身 AI 基准
摘要:我们提出了 BEHAVIOR-1K,一个以人为本的机器人综合模拟基准。BEHAVIOR-1K 包括两个部分,分别由“您希望机器人为您做什么?”这一广泛调查的结果指导和推动。第一个部分是定义 1,000 种日常活动,基于 50 个场景(房屋、花园、餐厅、办公室等),其中有 5,000 多个对象,并标注了丰富的物理和语义属性。第二个部分是 O MNI G IBSON,这是一个新颖的模拟环境,它通过逼真的物理模拟和刚体、可变形体和液体的渲染来支持这些活动。我们的实验表明,BEHAVIOR-1K 中的活动是长期的并且依赖于复杂的操作技能,这两者对于最先进的机器人学习解决方案来说仍然是一个挑战。为了校准 BEHAVIOR-1K 的模拟与现实之间的差距,我们提供了一项初步研究,研究如何在模拟公寓中使用移动机械手学到的解决方案转移到现实世界中。我们希望 BEHAVIOR-1K 的人性化本质、多样性和现实性能够使其对具身化 AI 和机器人学习研究有价值。项目网站:https://behavior.stanford.edu。

人工智能生成新颖的 3D 打印配方
配方开发是药物开发的关键步骤。该过程需要人类的创造力、独创性和对配方开发和加工优化的深入了解,这可能非常耗时。在此,我们测试了人工智能 (AI) 为三维 (3D) 打印创建从头配方的能力。具体来说,条件生成对抗网络 (cGAN) 是一种以创造力著称的生成模型,它在由 1437 种熔融沉积成型 (FDM) 打印配方组成的数据集上进行训练,这些配方是从文献和内部数据中提取的。总共探索了 27 种不同的 cGAN 架构,它们具有不同的学习率、批量大小和隐藏层数量参数,以生成 270 种配方。通过比较 AI 生成的配方和人类生成的配方的特点,发现具有中等学习率 (10 − 4 ) 的 cGAN 可以在生成新颖性和现实性兼具的配方方面取得平衡。使用 FDM 打印机制作了四种配方,其中第一个 AI 生成的配方已成功打印。我们的研究代表了一个里程碑,突出了 AI 承担创造性任务的能力及其彻底改变药物开发过程的潜力。

DriveGenVLM:基于视觉语言模型的现实世界视频生成
摘要 - 自主驾驶技术的发展需要越来越复杂的方法来理解和预测现实世界的情况。视觉语言模型(VLM)正在成为革命性的工具,具有影响自主驾驶的巨大潜力。在本文中,我们提出了DriveGenVLM框架来生成驾驶视频并使用VLM来理解它们。为了实现这一目标,我们采用了一个基于降级扩散概率模型(DDPM)的视频生成框架,旨在预测现实世界的视频序列。然后,我们通过在Egintric视频(EILEV)上采用预训练的模型,探讨了我们生成的视频在VLM中使用的充分性。通过Waymo打开数据集对扩散模型进行了训练,并使用FR´Echet视频距离(FVD)得分进行了评估,以确保生成的视频的质量和现实性。EILEV为这些生成的视频提供了相应的叙述,这可能对自主驾驶领域有益。这些叙述可以增强交通现场的理解,帮助导航并提高计划功能。在DriveGenVLM框架中将视频生成与VLM的集成代表了利用先进的AI模型来解决自主驾驶中复杂挑战的重要一步。
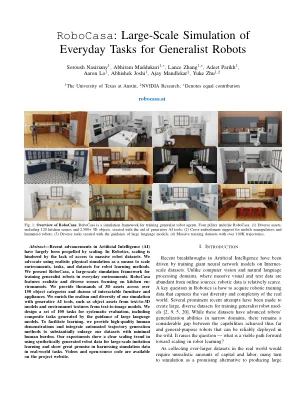
Robocasa:通才机器人日常任务的大规模模拟
摘要 - 人工智能(AI)的遗留进展很大程度上是通过缩放来推动的。在机器人技术中,由于缺乏对大型机器人数据集的访问而阻碍了缩放。我们提倡使用现实的物理模拟作为机器人学习方法扩展环境,任务和数据集的一种手段。我们提出了Robocasa,这是一个大规模的模拟框架,用于在日常环境中培训通用机器人。Robocasa以厨房环境为重点的现实和多样化的场景。我们提供了150多种对象类别以及数十个可相互作用的家具和设备的数千个3D资产。我们使用生成的AI工具来丰富模拟的现实性和多样性,例如文本到3D模型的对象资产以及来自文本图像模型的环境纹理。我们设计了一组100个用于系统评估的任务,包括大型语言模型指导产生的复合任务。为了促进学习,我们提供了高质量的人类示范,并整合自动轨迹生成方法,以实质上扩大我们的数据集的人类负担最小。我们的实验显示了使用合成生成的机器人数据进行大规模模仿学习的明确缩放趋势,并在利用现实世界任务中的仿真数据方面显示出巨大的希望。视频和开源代码可在项目网站上找到。

模拟网络的 AI 攻击规划
近几十年来,网络安全已成为私营和公共部门面临的最紧迫问题之一。网络安全威胁无处不在,但鉴于不断发展的网络的漏洞表面不断变化,因此极难防御。人们越来越希望进行自动网络攻击或红队攻击,这使网络防御者能够构建更好的发现和响应工作流程。过去几年,网络安全结构化威胁数据的可用性不断提高,这使得使用新技术进行自动红队攻击成为可能。本论文提出使用传统人工智能 (AI) 规划和领域特定适应性来解决这一网络安全自动化问题。我们开发的两个成功的自动红队 AI 规划系统 ClassAttack 和 ConAttack 证明了我们方法的实用性。ClassAttack 由一个经典规划器组成,它构建了可以在模拟网络上运行的静态可执行攻击场景。ConAttack 不仅具有额外的复杂性,而且具有现实性,它是一个将规划和执行交织在一起的应急规划器,可以更好地实时模拟真实红队的攻击。这两个系统都使用了专门为此网络安全应用程序设计的复杂知识库。这两个系统以及构建它们所需的知识工程代表了网络安全领域一项重大而新颖的努力。

Hines, Adam D.、Stratton, Peter G.、Milford, Michael 和 Fischer, Tobias (2024) VPRTempo:一种用于视觉的快速时间编码脉冲神经网络
摘要 — 脉冲神经网络 (SNN) 凭借其潜在的节能、低延迟和持续学习能力,处于神经形态计算的前沿。虽然这些功能非常适合机器人任务,但迄今为止,SNN 在该领域的应用有限。这项工作引入了一种用于视觉位置识别 (VPR) 的 SNN,它既可以在几分钟内训练,又可以在几毫秒内查询,非常适合部署在计算受限的机器人系统上。我们提出的系统 VPRTempo 使用抽象的 SNN 克服了训练和推理时间缓慢的问题,该 SNN 以生物现实性换取效率。VPRTempo 采用时间代码,根据像素的强度确定单个脉冲的时间,而之前的 SNN 则依赖于确定脉冲数量的速率编码;将脉冲效率提高了 100% 以上。 VPRTempo 使用脉冲时间依赖性可塑性和监督增量学习规则进行训练,强制每个输出脉冲神经元只对一个位置做出反应。我们在 Nordland 和 Oxford RobotCar 基准定位数据集上评估了我们的系统,这些数据集包含多达 27,000 个位置。我们发现 VPRTempo 的准确性与之前的 SNN 和流行的 NetVLAD 位置识别算法相当,同时速度快几个数量级,适合实时部署 - CPU 上的推理速度超过 50 Hz。VPRTempo 可以作为在线 SLAM 的环路闭合组件集成到资源受限的系统(例如太空和水下机器人)上。

LaSNN:分层 ANN 到 SNN 提炼,用于深度脉冲神经网络的有效和高效训练
摘要 —脉冲神经网络 (SNN) 具有生物现实性,且由于其事件驱动机制而在低功耗计算方面具有实际应用前景。通常,SNN 的训练会在各种任务上遭受准确度损失,其性能不如 ANN。提出了一种转换方案,通过将训练好的 ANN 参数映射到具有相同结构的 SNN 来获得具有竞争力的准确度。然而,这些转换后的 SNN 需要大量的时间步骤,从而失去了节能优势。利用 ANN 的准确度优势和 SNN 的计算效率,提出了一种新颖的 SNN 训练框架,即逐层 ANN 到 SNN 知识提炼 (LaSNN)。为了实现具有竞争力的准确度和减少推理延迟,LaSNN 通过提炼知识而不是转换 ANN 的参数将学习从训练有素的 ANN 转移到小型 SNN。通过引入注意力机制,我们弥合了异构 ANN 和 SNN 之间的信息鸿沟,利用我们的分层蒸馏范式有效地压缩了 ANN 中的知识,然后有效地传输这些知识。我们进行了详细的实验,以证明 LaSNN 在三个基准数据集(CIFAR-10、CIFAR-100 和 Tiny ImageNet)上的有效性、功效和可扩展性。与 ANN 相比,我们实现了具有竞争力的 top-1 准确率,并且推理速度比具有类似性能的转换后的 SNN 快 20 倍。更重要的是,LaSNN 灵活且可扩展,可以毫不费力地为具有不同架构/深度和输入编码方法的 SNN 开发,从而促进其潜在发展。
案例研究:德国和瑞典与罗马尼亚和希腊
摘要 数字经济是传统经济的替代品,是未来欧洲论坛和成员国都重点关注的投资和研发领域,随着疫情危机的爆发,他们已经意识到了这一领域的重要性。这项研究的目的是,一方面,通过 2025 年经济数字部分发展的三种情景(基线情景、高增长情景和挑战情景),分析和预测数字化对欧盟成员国经济的影响,另一方面,分析和预测成员国实现这些情景提出的目标的能力。分析涵盖 2013 年至 2025 年期间,并基于专门的统计分析(频率序列分析、应用单标准临界概率检验、应用 Enter 方法、执行 Pearson 相关性检验)量化数字化现象和过程的动态,使用 IBM-SPSS 25 软件。这项研究的目的是为决策者提供数字化发展的相关解决方案。该研究强调了将结果置于有利情景中,以及当前数字经济发展的趋势,并介绍了在了解提供商的服务和用户需求方面最有可能实现的情景。该研究的主题是针对在当前全球危机和疫情条件下实施数字经济发展政策所需的数字经济可持续发展的财政分配基础采取一种新方法。这项研究的新颖之处在于概念化、验证和测试了一个计量经济模型,该模型能够量化欧盟提出的数字经济发展情景的现实性。关键词:数字化;数字化指标;数字化发展情景:基线情景、高增长情景和挑战情景;数字化发展的计量经济模型;数字市场分化:德国、瑞典 vs 罗马尼亚、希腊。JEL 分类:F63;O30;C40。