XiaoMi-AI文件搜索系统
World File Search System电控制
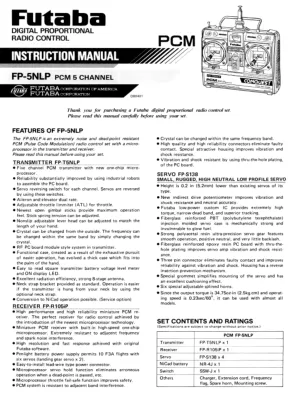
Futaba - 数字比例无线电控制
hobbico.com › fut PDF 2006 年 11 月 17 日 — 2006 年 11 月 17 日 感谢您购买 Futaba 数字比例无线电控制套件 ... 高性能和高可靠性微型 PCM 接收器。

目录,2007 年 5 月 - Micron 无线电控制
DSP 解码器:ECO、MAX 和 FET 接收器配有可选智能解码器。它使用数字信号处理(因此称为 DSP )在受到干扰时提供优雅的降级。它分析控制帧以确定是否受到干扰(或噪声)的影响,如果某个帧被认为是坏的,则每个输出通道设置为最后 4 帧的平均值。结果是伺服响应在受到相当大的干扰时会减慢,而不是到处跳跃。最终,解码器决定信号已完全损坏或已丢失,并进入“故障安全”模式。可以从 Micron 网站下载 DSP 接收器设置指南或 DSP 解码器套件组装手册,了解更多详细信息。
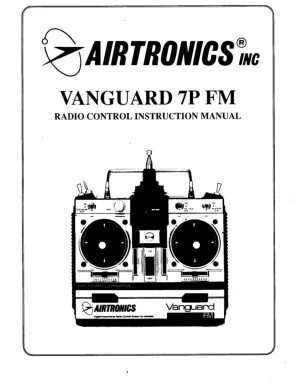
vanguard 7p fm - 无线电控制使用说明书
rcheliguy.com › 全球 › Airtronics PDF 2003 年 2 月 28 日 — 2003 年 2 月 28 日 AARDA 的数字比例无线电控制系统Vanguard...因为可靠性和安全运行而负责

基于域壁运动的缩放自旋逻辑设备的全电控制
摘要 - 基于域墙(DW)运动的旋转逻辑设备提供了灵活的体系结构,以存储和携带逻辑信息在电路中。在此设备概念中,信息以多个磁性隧道连接(MTJ)共享的磁道磁态进行编码,并通过DW运动处理。在这里,我们证明可以使用新型的MTJ堆栈来实现这种基于纳米级DW的逻辑设备的全电动控制。除了各向同性的场驱动运动外,我们还显示了由电流驱动的DWS的方向运动,这是逻辑操作的关键要求。使用DW运动对逻辑门的完整电气控制。我们的设备在全晶片的IMEC的300毫米CMOS Fab中制造,这清除了大规模集成的路径。因此,此概念证明为逻辑和神经形态应用提供了高性能和低功率DW设备的潜在解决方案。
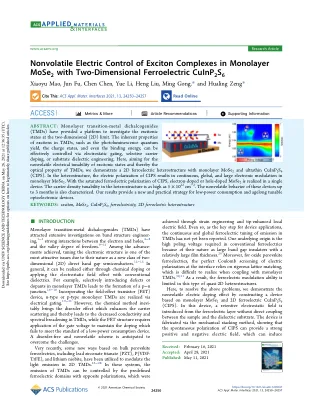
单层 MoSe2 中激子复合物与二维铁电体 CuInP2S6 的非挥发性电控制
摘要:单层过渡金属二硫属化物 (TMD) 为研究二维 (2D) 极限下的激子态提供了平台。TMD 中激子的固有属性,例如光致发光量子产率、电荷态甚至结合能,可以通过静电门控、选择性载流子掺杂或基底电介质工程进行有效控制。本文,为了实现激子态的非挥发性电可调性,从而实现 TMD 的光学属性,我们展示了一种具有单层 MoSe 2 和超薄 CuInP 2 S 6 (CIPS) 的二维铁电异质结构。在异质结构中,CIPS 的电极化导致单层 MoSe 2 中出现连续、全局和大的电子调制。利用 CIPS 的饱和铁电极化,可以在单个器件中实现电子掺杂或空穴掺杂的 MoSe 2。异质结构中载流子密度可调性高达 5 × 10 12 cm − 2 。还表征了这些器件长达 3 个月的非挥发性行为。我们的研究结果为低功耗和长期可调的光电器件提供了一种新的实用策略。关键词:激子、MoSe 2 、CuInP 2 S 6 、铁电性、2D 铁电异质结构■引言
Roland A. Boucher - 模型航空学院
AMA 历史项目呈现: ROLAND A. BOUCHER 自传 模型师、作家、电动模型先驱、模型行业 出生于 1932 年 7 月 12 日 1942 年开始建模 AMA #961 由 RAB 撰写并提交(1996 年 7 月);由 NR 转录(1996 年 8 月); SS 编辑(2002 年),JS 重新格式化并更新(2007 年 10 月、2012 年 7 月) 生涯: 驾驶电动 RF-4 在封闭航线上飞行超过 40 英里,创下世界纪录 设计和制造了世界上第一架太阳能飞机 书籍作者,《安静的革命》和《电动飞行》 担任古董模型协会 #49 比赛总监和副总裁超过 15 年 第二次世界大战期间,驾驶自由飞行橡胶、二氧化碳和 U 型控制发光飞机 09-49 荣誉: 2000 年:模型航空名人堂 1948 年:仅制造无线电控制 (RC) 方向舵(自制无线电扑翼方向舵比例)。 1952 年:退出并驾驶全尺寸飞机。 1 1965 年:与兄弟 Bob 加入 Astro Flight,设计了以下产品: Torrey Pines A-2 北欧自由飞行套件 世界上第一台电力装置 Astro 10 Astro 15、25、05、020 和快速电池充电器 RF-4 比例供电滑翔机发光无线电控制套件 RF-4 比例电动滑翔机电动无线电控制套件 Bushmaster 电动运动电动无线电控制套件 Electra 225 电动图案船电动无线电控制套件 1971 年:2 月 5 日,驾驶电动 RF-4 飞越 40 英里封闭航线,创下世界纪录。AMA ref
2023/2024 H2GP Pro National Level
Horizon Hydrogen Grand Prix(H2GP)的Horizon Educational是一项针对高中生的教育计划,专注于可再生能源,尤其是氢燃料电池。 它的亮点是一场无线电控制(RC)赛车,在其中设计,工程师和赛车供电的汽车。 该计划包括一个教育课程,学生可以在其中学习清洁能源并获得有关技术技能的动手指导。 H2GP自2015年以来一直在全球范围内运行,全球20多个国家的参与。Horizon Hydrogen Grand Prix(H2GP)的Horizon Educational是一项针对高中生的教育计划,专注于可再生能源,尤其是氢燃料电池。它的亮点是一场无线电控制(RC)赛车,在其中设计,工程师和赛车供电的汽车。该计划包括一个教育课程,学生可以在其中学习清洁能源并获得有关技术技能的动手指导。H2GP自2015年以来一直在全球范围内运行,全球20多个国家的参与。

太阳能外墙遮阳篷。为新建和现有建筑提供可持续的遮阳效果。
无线电控制电机 标配无线电电机 (T3.5 ESP Hz-DC-10/12)。通过障碍物检测可避免损坏。如果外墙遮阳篷行驶区域有障碍物,电机将关闭。它还具有防霜冻功能,防霜冻功能可确保在霜冻停止时安全停止。太阳能套件的发射器采用市场上认可的无线电技术,以其可靠性能而闻名。

atp 6-02.53 战术无线电操作技术
第 10 章 电子战与防护技术 ...................................................................................................... 10-1 电子战 ...................................................................................................................... 10-1 电子防护职责 .............................................................................................................. 10-3 通信规划流程 ............................................................................................................ 10-5 信号安全 ...................................................................................................................... 10-7 发射控制 ...................................................................................................................... 10-7 预防性电子防护技术 ............................................................................................. 10-8 单通道地面和机载无线电系统抗干扰 ............................................................. 10-14 单通道战术卫星的电子战 ............................................................................................. 10-15 反无线电控制简易爆炸装置电子战 ............................................................................. 10-17 有目的的干扰 ............................................................................................................. 10-17 电磁干扰 ............................................................................................................. 10-17

通过电流诱导相变对范德华磁体磁阻进行巨大调节
有效的磁化控制是磁学和自旋电子学的核心问题1-8。特别是,对于具有非常规功能的自旋电子器件,对范德华 (vdW) 磁体中磁态的多功能操控的需求日益增加9-13。已经实现了通过自旋扭矩对 vdW 磁体进行磁化切换的电控制,但在没有外部磁场的情况下铁磁状态到反铁磁状态之间的电流诱导相变尚未得到证明12,14,15。在这里,我们报道了电流诱导的 vdW 铁磁体 Fe 5 GeTe 2 中的磁相变,从而产生了巨磁电阻。基于磁输运测量和相关理论分析,我们证明该转变是通过平面电流诱导的跨 vdW 间隙电压差在各层中依次发生的。 34 Fe 5 GeTe 2 中磁相的电流可调性为磁性能的电控制开辟了一条道路,扩展了我们将 vdW 磁体用于各种自旋电子器件应用的能力。36