XiaoMi-AI文件搜索系统
World File Search System盲侧

太阳能微电网的需求侧管理...
全球有超过 17% 的人口无法用电,其中大多数居住在撒哈拉以南非洲和南亚的农村地区。微电网技术是解决农村和偏远地区电气化问题的一个有前途的解决方案;然而,不断增长的电力需求仍然是一个巨大的挑战,导致严重的停电。需求侧管理是应对挑战不可或缺的工具。本文采用基于激励措施和分时电价的数学模型,使用从坦桑尼亚阿鲁沙一个偏远村庄 Ngurdoto 太阳能微电网收集的数据来模拟住宅客户的日常用电模式。根据需求价格弹性的概念评估了客户对价格上涨的响应能力。使用两种需求响应策略,即负荷转移 (LS) 和计划负荷减少 (SLR),结果表明 LS 可分别实现高达 4.87% 的节能、19.23% 的成本节省以及约 31% 和 19% 的峰值降低和功率因数提高。 SLR 方法可节省约 19% 的能源、节省 49% 的成本并提高 24% 的功率因数。因此,本研究的结果可能会使系统比发展中国家目前的公用事业更高效、更稳定。

朝着基因组治疗我的骨营养侧...
疗程。参与者被随机分配到 tofersen(20、40、60 或 100 毫克)或安慰剂,在 12 周内分 5 次鞘内给药。在接受最高剂量 tofersen 的患者中,脑脊液 (CSF) 中的 SOD1 水平显著降低。虽然该试验不足以证明临床疗效,但一些接受治疗的患者也显示出临床功能和肌肉力量改善的证据。“我们目前正在进行一项 III 期研究,以研究 tofersen 的疗效和安全性,”Miller 说。“这项研究招募了快速进展和缓慢进展的患者,以便我们充分了解该药物的潜力。”在第二项研究中,两名患有 SOD1 ALS 的患者接受了 SOD1 靶向 microRNA,递送到
肌萎缩侧索硬化症的最新进展
摘要 近几年来,我们对 ALS 疾病分子机制的理解取得了长足进步,并迈出了将新研究成果(包括基因治疗方法)转化为临床实践的第一步。同样,在日益复杂的多学科行动背景下,辅助技术的最新出现也大大提高了采用更加个性化的支持和对症治疗方法的可能性,而这仍然是 ALS 管理的基石。在这种快速发展的背景下,我们在此全面介绍了有助于我们了解 ALS 发病机制的最新研究、临床试验的最新结果以及改善 ALS 患者临床管理的未来方向。
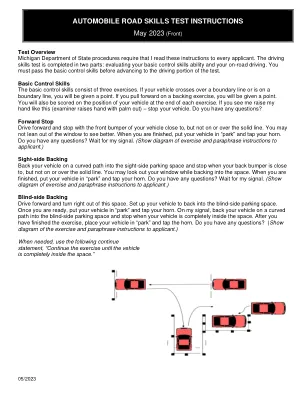
汽车道路技能测试说明可能...
测试概述密歇根州州程序要求我向每个申请人阅读这些说明。驾驶技能测试分为两个部分:评估您的基本控制技能能力和公路驾驶。您必须通过基本控制技能,然后才能前进到测试的驾驶部分。基本控制技能基本控制技能由三个练习组成。如果您的车辆越过边界线或在边界线上,您将获得一个点。如果您向前进行衬托练习,将为您提供一个观点。您还将在每个练习结束时在车辆的位置上进行评分。如果您看到我这样的举手(考官用手掌伸出手) - 停止车辆。您有任何疑问吗?向前驱动前向前驱动,并在车辆的前保险杠上停止,但在实线上或距离上没有。您可能不会倾斜窗户看得更好。完成后,将车辆放在“公园”中,然后敲打号角。您有任何疑问吗?等待我的信号。(向申请人进行练习和解释指令的图表。)视线侧向弯曲的路径回到视线停车位,然后在后保险杠靠近(但不在坚固的线上)时停止。您可以在返回空间时向外看窗口。完成后,将车辆放在“公园”中,然后敲打号角。您有任何疑问吗?等待我的信号。盲侧背倾向向前驱动,然后向右转出这个空间。(向申请人进行练习和解释指令的图表。)设置您的车辆以返回盲侧停车位。准备就绪后,将车辆放入“公园”中,然后敲打喇叭。在我的信号上,将车辆靠在弯曲的路径上,进入盲侧停车位,并在车辆完全在空间内时停止。完成练习后,将车辆放在“公园”中,然后点击喇叭。您有任何疑问吗?(练习图和向申请人的解释说明的图表。)在需要时,请使用以下继续陈述:“继续练习,直到车辆完全在空间内为止。”

无人机的新趋势 - Air Power Australia
苏霍伊 u-35bm/u-35-1 侧卫 E 基础型 Su-35 侧卫 E 于 1993 年首次公开亮相后,于 20 世纪 90 年代中期投入使用。被称为“超级侧卫”的 Su-35 营销名称取代了开发过程中使用的初始军用名称 Su-27M(改进型)。第一架原型机的制造工作于 1987 年开始。这架飞机是当时由苏联前线航空兵和 PVO-S 防空部队运营的 Su-27 和 Su-27S 侧卫 B 空中优势战斗机的渐进式发展。这些“基线”侧卫战斗机几乎专注于空中优势和防空任务,与美国 MDC F-15A-D 变体类似,并且只配备了在基本视觉和盲轰炸模式下投放哑弹的功能。Su-35 是第一款真正的“多用途”侧卫战斗机,配备了投放智能武器以及一系列增强的空战功能。Su-27M 最明显的区别是采用了鸭翼前翼和扩大的翼套面积,最初是为海军 Su-27K/Su-33 侧卫 D 开发的。鸭翼在机动过程中提供了更好的俯仰率,增强了飞机的低速和高阿尔法操控性,同时提供了更广泛的重心条件。

使用双侧微电极记录对四肢瘫痪患者的双侧手势进行同时分类
大多数日常任务都需要同时控制双手。在这里,我们使用从四肢瘫痪参与者的双侧运动和体感皮层记录的多单元活动来展示双手手势的同时分类。使用针对每只手分别训练的分层线性判别模型对尝试的手势进行分类。在一项在线实验中,手势被连续分类并用于控制两个机械臂进行中心向外运动任务。需要保持一只手静止的双手试验产生了最佳表现(70.6%),其次是对称运动试验(50%)和非对称运动试验(22.7%)。我们的结果表明,可以使用两个独立训练的手部模型同时解码双手的手势,但随着双手手势组合的复杂性增加,使用这种方法进行在线控制变得更加困难。这项研究展示了使用双侧皮层内脑机接口恢复双手同时控制的潜力。

了解辅助技术对盲人和视力障碍人士的社会心理影响:
方法:审查将包括 2019 年至 2024 年期间以英文发表的主要研究,重点关注辅助技术对盲人和视力不佳者的社会心理结果。符合条件的研究将涉及各个年龄段和各种环境下的盲人和部分失明参与者,研究心理(例如情绪健康、自尊)和社会结果(例如社会参与、支持)。将在七个电子研究数据库中进行搜索:CINAHL(EBSCO)、PsycINFO(EBSCO)、ACM 数字图书馆、IEEE Xplore、Scopus、Web of Science 和 Google Scholar(前 100 条记录)。研究将根据预定义的资格标准进行筛选和选择,数据提取将重点关注出版细节、研究设计、人口特征、辅助技术类型和心理社会影响。结果将使用描述性统计数据、图表和叙述综合进行总结。

一个扩散模型,具有降级盲逆成像的状态估计
解决反向成像问题的任务可以从具有完整信息的输入测量中恢复未知的干净图像。利用强大的生成模型,例如降级扩散模型,可以更好地解决未知清洁图像的分布情况的不利问题的问题。我们提出了一个可学习的基于状态估计量的扩散模型,以将测量中的含量纳入重建过程。与条件扩散模型相比,我们的方法可以充分利用具有计算可行性的预训练的扩散模型,而条件扩散模型需要从头开始训练。此外,我们的管道不需要对图像降解操作员的明确知识,也不需要其形式的假设,就像在测试时使用预先训练的扩散模型的许多其他作品一样。实验在三个典型的逆成像问题(线性和非线性),介入,deblurring和JPEG压缩恢复方面具有与最先进的方法具有综合结果。

盲视 大脑植入技术帮助盲人恢复视力
录制和播放视频?这个比喻很恰当,因为盲视旨在将摄像机捕捉到的图像并由计算机处理后直接发送到人脑中产生视觉的部分。生物视觉:光线通过眼睛的晶状体聚焦到视网膜上。视网膜中的细胞将光线转换成电信号。这些电信号传输到视神经,视神经将这些电信号传送到大脑的视觉皮层。视觉皮层将这些电信号处理成我们看到的图像。摄像机视频录制:光线通过摄像机镜头进入并聚焦到图像传感器(CCD 或 CMOS)上。传感器将光线转换成电信号。来自图像传感器的电信号由系统微芯片和电路处理。这包括调整曝光、白平衡和其他设置。处理后的图像数据被数字化并存储在摄像机的内存或外部存储设备上。 Neuralink 将使用摄像头和计算机处理器来创建 Blind-sight 直接传输到大脑视觉皮层的电信号。人眼记录图像的方式与相机不同。我们的大脑对周围的世界产生连续的感知,但这种感知不会以数据的形式存储。

人工智能助力盲人和残障人士打造无障碍厨房
摘要 — 本项目旨在通过集成先进的硬件和软件技术,为视障人士提供安全独立的厨房导航。硬件模块采用 ESP32 微控制器,并集成了多个安全组件。温度传感器监测食物或烹饪食材的热量,并通过语音提醒是否适合食用。气体传感器通过检测泄漏并自动触发气缸旋钮关闭机制来确保安全。火灾探测由专用传感器管理,该传感器在紧急情况下会激活蜂鸣器。称重传感器用于测量物品的重量,当重量低于预设阈值时,系统会发出语音提示,通知用户重新加料。这些功能共同确保了安全便捷的烹饪环境,并根据视障用户的需求量身定制。在软件方面,该系统采用先进的人工智能驱动技术,进一步协助用户。图像转文本技术可以识别和发音包装上标注的成分名称,从而无需进行视觉识别。此外,基于 YOLOv5 的物体检测算法可以识别各种厨房食材、蔬菜和水果,并提供实时语音反馈,从而提升可用性。智能传感器与机器学习算法的结合,打造出强大且用户友好的解决方案,提升了用户的独立性和安全性。这款创新系统弥合了无障碍功能与科技之间的差距,使用户能够轻松自信地完成厨房任务。关键词:无障碍功能、ESP32、AI 驱动的厨房助手、温度检测、气体传感器、火灾探测、称重传感器、图像转文本、YOLOv5、物体检测、语音输出、视障人士支持、实时协助、智能厨房、安全监控。