XiaoMi-AI文件搜索系统
World File Search System相邻
神经假体的慢性稳定性,包括猴子中的多个相邻犹他州阵列
1荷兰神经科学研究所,Meibergdreef 47,1105 Ba Amsterdam,荷兰BA阿姆斯特丹2号,荷兰2匹兹堡医学院,匹兹堡医学院,1622年,匹兹堡大学,匹兹堡,匹兹堡,匹兹堡,宾夕法尼亚州15219,Unity the Unity the Underiation Instrucation,University Instrucation,Unterional Instrucation,Utrrytry unmort ushort ushortzt荷兰4视觉脑疗法实验室,索邦大学,国家德拉·桑特(National de laSanté等人) Freiburg, Germany 6 BrainLinks-BrainTools Center, University of Freiburg, Georges-Köhler-Allee 201, 79110 Freiburg, Germany 7 Freiburg Institute for Advanced Studies (FRIAS), University of Freiburg, Albertstraße 19, 79104 Freiburg, Germany 8 Chalmers University of Technology, Chalmersplatsen 4, 412 96瑞典哥德堡9号综合神经生理学系,VU大学,DE BOELELAAN 1085,1081 HV AMSTERDAM,荷兰10号HV Amsterdam,荷兰10精神病学系,学术医学中心,Postbus 22660,1100 DD Amsterdam,荷兰1100 DD Amsterdam,荷兰11.这些作者为这项工作贡献了同等的贡献。∗作者应向谁解决任何信件。
良好的位置:关于表面绑定的相邻组对模型碳捕获材料中二氧化碳吸附特性的被动和主动调查的影响
浓度。[1]在过去几年中,多种材料,例如多孔二氧化硅,金属有机框架(MOF),沸石,多孔碳,共价有机/三嗪框架(COFS/CTFS)和多孔有机聚合物(POPS),以供碳捕获应用。[1b,2]在这些材料中,化学膜起着重要的作用,因为它们对CO 2的亲和力提高,这对于在稀释应用中应用CCM是必不可少的。[1A,3]理想情况下,CCMS应结合高容量,高亲和力但容易再生,高选择性和对杂质的耐受性,例如水和其他痕量气体。[1A,4]但是,尚未找到满足所有这些标准的材料。模型系统可用于确定最重要的设计原理,以提高未来CCM的性能。对于下一代化学吸附剂设计设计的一个关键挑战是在吸附热ΔHADS↔再生能量和选择性之间找到理想的平衡。[1a]到目前为止,存在两种主要策略来计算CCM的这些指标:主动捕获中心的优化和多孔结构的优化。在此,我们提出了一种新策略:将附近的分子环境更改为吸附中心,以吸附CO 2吸附。我们的假设是,可以通过引入直接邻域中存在的不同官能团来调制活动捕获组(例如胺,NH2)与CO 2的相互作用。胺功能化材料是广泛研究的CCMS类。Wang等。Wang等。文献中存在最初的提示,实际上,纳米环境在化学CO 2吸附过程中起着重要作用。[5]机械研究表明,邻近组(NGS),例如表面上的相邻胺基,例如影响CO 2的吸附。[5a,c,6]据报道,硅胶材料中存在的硅烷醇基团(SIOH)也具有作用。[5a,6a – d]通过IR和NMR光谱(例如最常见的氨基甲酸酯[5a,c,6],以及尿素[6b,e]或碳酸氢盐种类,已经鉴定出不同的表面结合物质。[6e,f]到目前为止,只有很少的研究集中在相邻群体的影响下。研究了与相邻OH/NH 2种的共存的吡啶氮种类的影响,发现这些相邻群体在增强捕获性能

酒精饮料 - Navy.mil
第122条-违反州法律将货物运往州内持有或销售。禁止以任何方式或任何手段将任何蒸馏酒、葡萄酒、麦芽酒、发酵酒或其他醉人酒类从美国的某个州、领地或地区,或与其不相邻但受其管辖的地方装运或运输到美国的任何其他州、领地或地区,或与其不相邻但受其管辖的地方,或从任何外国装运或运输到美国的任何一个州、领地或地区,或与其不相邻但受其管辖的地方,并且任何有意以违反该等州、领地或地区或与其不相邻但受其管辖的地方的任何法律的方式接收、持有、出售或以任何方式使用上述蒸馏酒、葡萄酒、麦芽酒、发酵酒或其他醉人酒类。

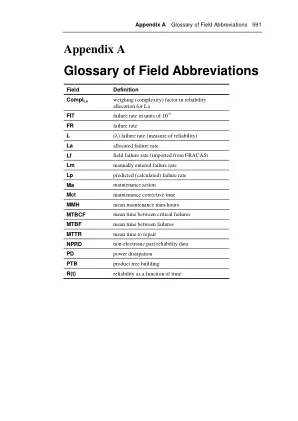
附录 A - 字段缩写词汇表 - ALD 软件
(无提示)环境温度类型。如果是固定温度,则项目的温度等于相邻 °C 字段中输入的值。如果是温度差,则项目的温度等于相邻 °C 字段中的值加上父项的温度。

mgy-002 遥感和图像解释 - eGyanKosh
有时,单个探测器不会记录某个像素的接收信号。这可能会导致随机坏像素。如果在场景中发现大量随机坏像素,则将其称为散粒噪声。短噪声会给图像一种有许多黑色戳痕的印象。通常,这些坏像素在一个或多个波段中包含 0 或 255(8 位数据)范围内的值。通过识别给定波段中位于截然不同的相邻像素值中间的 0(黑色)或 255(白色)像素,可以消除散粒噪声。然后,这些噪声像素被其各自的八个相邻像素的平均像素值替换。例如,在图 11.2ab 中,其中两个像素具有零灰度级,这与它们的相邻像素完全不同。这些像素被标记为散粒噪声像素,并被其八个相邻像素的平均值替换。

案卷号
4 2023年财政责任法,公共法118-5,137 Stat 10,sec。322(2023)(“财政责任法”或“法案”)。请参阅指示NERC的第322条,与每个区域实体进行协商以及传输效用,该效用与附近的传输计划区域中的传输实用程序相互联系,以准备一项针对18 C.F.R.定义的总转移能力的研究。§37.6(b)(1)(vi),其中包含以下内容:(i)当前每对相邻传输计划区域之间的当前总传输能力; (ii)对每对相邻传输计划区域之间总传输能力的谨慎增加的建议,这些区域将明显地增强此类相邻传输计划区域内和之间的可靠性; (iii)建议满足和维持每对相邻传输计划区域之间的总传输能力。
基于导航雷达回波视频数据的占据栅格地图构建方法
摘 要 : [ 目的 ] 为解决无人艇的船载导航雷达对养殖区 、 浮筒 、 小型漂浮物等海洋漂浮障碍物感知效果不 佳的问题 , 提出一种基于导航雷达回波视频数据构建与更新的占据栅格地图的环境感知方法。 [ 方法 ] 首 先 , 采用多级集合的形式描述雷达点迹与回波点间的包含关系 , 为栅格地图构建奠定基础 , 期间 , 基于群相邻 关系对近邻点迹进行凝聚 , 抑制目标分裂导致的航迹偏差 ; 然后 , 利用所提的基于自然对数函数的占据栅格 地图概率更新算法 , 通过合理利用历史数据区分海杂波与微小海洋漂浮障碍物 ; 最后 , 建立基于点迹属性的 栅格地图概率扩散模型 , 以较好地保证典型动态目标占据栅格更新的实时性。 [ 结果 ] 实船试验结果表明 , 所提方法可准确获取养殖区 、 浮筒等成片海洋漂浮障碍物的轮廓信息 , 抑制目标分裂现象 ; 与经典方法相比 , 所提方法对干舷 0.5 m 的小型漂浮物首次发现距离提升了 78.34 m , 定位精度提升了 1.42 m 。 [ 结论 ] 所提方 法能够实现对多种海洋漂浮障碍物 、 海面运动目标的准确感知 , 确保无人艇航行安全。