XiaoMi-AI文件搜索系统
World File Search System移动性
IAA移动性2023
数十年来,Forvia与所有主要的欧洲汽车制造商建立了牢固的关系,以支持他们的转型。,Forvia认识到欧洲的全球流动转型潜力,与大学,研究机构和初创企业紧密合作,以开发该地区欧洲市场的解决方案。强大的内部开发中心,例如奥格斯堡和巴凡斯的氢枢纽,领导照明和电子研究中心或2022年在里昂新成立的可持续材料的材料业务部门,强调了这一野心。

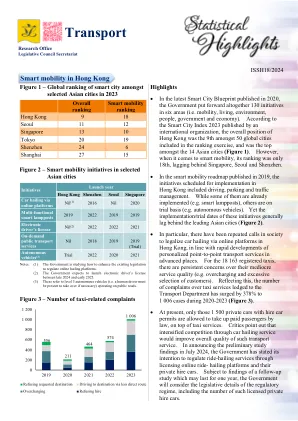
香港的智能移动性
亮点•在2020年出版的最新智能城市蓝图中,政府在六个地区提出了130项计划(即流动性,生活,环境,人,政府和经济)。根据国际组织出版的智慧城市指数2023,香港的整体地位是排名练习中50个全球城市中的第9位,并且在14个亚洲城市中排名第一(图1)。但是,在智能移动性方面,其排名仅为第18位,落后于新加坡,首尔和深圳。•在2019年发布的智能移动路线图中,计划在香港实施的计划包括驾驶,停车和交通管理。虽然其中一些已经实现(例如智能灯柱),其他人正在审判(例如自动驾驶汽车)。然而,这些举措的实施/试验日期通常落后于亚洲主要城市(图2)。•特别是,社会上有一再呼吁通过香港的在线平台合法化汽车,这与高级地方的个性化点对点运输服务的快速发展相一致。对于18 163个注册出租车,对其中等服务质量存在持续的担忧(例如过度收费和过度选择客户)。反映这一点,在2020 - 2023年期间,提交给运输部门的出租车服务投诉数量增加了378%至1 006案件(图3)。批评者指出,通过狂欢服务加强竞争将提高这种运输服务的整体质量。•目前,只有1500辆带有租车许可证的私人汽车被允许在出租车服务上依法占用有偿乘客。在宣布2024年7月的初步研究结果时,政府表示打算通过许可在线乘车平台及其私人租车来规范乘车服务。有一项可能持续一年的后续研究的调查结果,政府将考虑监管制度的立法细节,包括此类许可的私人租赁汽车的数量。

模块693智能建筑和移动性
a) Course: • Basics of IoT applications, sensors and actuators • Monitoring and networking of intelligent devices • Recording of environmental data (air quality, humidity, ...) • Digitization of commercial buildings (... in contrast to private households) • Demand-based building control (space/room occupancy, lighting, air conditioning, access restrictions, ...) • Mobility infrastructure (parking space monitoring, sharing models, charging stations, traffic路线,扇区耦合(例如智能,双向电动机的双向充电))•优化移动性提供提供节能,低排放,舒适且具有成本效益的流动性(网络系统)•先决条件/机会/在私人和工业环境中自主驾驶的风险/风险•数字责任(数字责任目标)


能量过渡以及移动性将在哪里
目前,如果没有法律规定,重新发行的商业案例不是经济的。生成的氢与天然气价格竞争,因为该值仅由加热值确定。电解氢的竞争力显着增加,在此过程中基本需要氢气的应用中。取决于常规氢生产相关的发电成本的规模在每公斤1.4至5美元之间。汽车制造商,石油行业和天然气供应商的协议同意以低于10美元/千克的价格将氢出售给最终用户,以4-5美元/千克的价格出售氢(8)。此外,估计将现有的氢气中的巨大需求估计足以使
为什么住房对于向上的移动性很重要
在过去两年中,Urban与Enterprise合作审查了住房和向上流动性的证据。首先,Urban进行了访谈和文献综述,重点介绍了负担得起住房中的居民服务如何促进出版经济流动服务的经济流动服务:探索居民服务作为经济成功的工具(Burnstein,Gallagher,Gallagher和Oliver 2019)。城市研究人员还为企业与TriveTogether网络的参与提供了技术支持,包括出版物“从贫困中提高流动性:住房和教育合作伙伴的工具包”(企业社区合作伙伴2020)和“统一住房和教育:有希望的实践和结构挑战的证据”(Gallaghagher等人”(Gallagher等。2020)。这些研究产品受益于企业在住房领域的专业知识和经验。反过来,Urban的研究向企业的本地和国家经济流动策略提供了信息。

舱外活动和人体表面移动性 - ...
舱外活动和人类表面机动性技术 新的合作机会 编号:80JSC022EHP 目的:NASA 舱外活动(EVA)和人类表面机动性(HSM)计划(EHP)寻求与合作伙伴合作,推进与人类表面机动性相关的技术,以支持 NASA 的 Artemis 任务。EHP 的愿景是提供安全、可靠和有效的 EVA 和 HSM 能力,使宇航员能够在月球上和月球周围的航天器范围之外生存和工作。Artemis 任务将使用创新技术将人类返回月球表面,探索比以往更多的月球表面。我们将与商业和国际合作伙伴合作,建立第一个长期月球存在。然后,我们将利用在月球上和月球周围学到的知识来实现下一个巨大的飞跃:将第一批宇航员送上火星。 EHP 飞行项目包括探索舱外航天服 (xEVA 航天服) 和工具、月球地形车 (LTV) 和加压探测车 (PR)。有关更多信息,请参阅此处的 EHP 网站:舱外活动和人类表面机动性 - NASA。EHP 及其合作伙伴将合作开发月球表面能力,以降低风险并提高 Artemis 任务期间 EHP 飞行项目的生产力。重点将放在减轻月球表面系统风险的技术上,这些技术将为任务规划者提供更多选择,从而提高任务成功率。在追求这些类型的能力时,NASA 和潜在合作伙伴将开发新的和改进的技术,为多个行业的地面应用提供更多选择。附加信息:EHP 可能会定期在本公告的附录中发布,确定目前正在开发的特定技术,以进一步提供潜在的合作机会。附录 A - 月球尘埃水平传感器及其对表面的影响 (LDES) 中描述了一种正在开发的此类技术的示例。要访问此出口管制文件,请发送电子邮件至以下联系人。(文件可在 Sam.gov 上找到。) EHP 定期将与月球人类表面流动性相关的信息参考文件放在 EHP 技术库中,供业界查阅。访问技术库需要 Login.gov 访问权限。按照提示获取访问权限。一旦获得访问权限,与此公告相关的信息文件将位于“EHP 技术集成”文件夹中,您将在其中找到以下信息(技术库内容的重大更新也将在此处更新):