XiaoMi-AI文件搜索系统
World File Search System空间跟踪

公民社会对欧洲议会和立法机构AI法案草案报告作出反应
由于纳入了“基于生物特征的数据”的新定义(第 64 号修正案)以及对情绪识别和生物特征分类定义的修改(第 67 和 68 号修正案),生物特征分类和情绪识别存在问题的定义已经得到改进。然而,报告草案并未作出进一步修改,以解决使用其他生物特征系统所造成的广泛危害。正如我们在《公民社会声明》中所建议的那样,《人工智能法案》必须进一步禁止情绪识别,以及用于在公共空间跟踪、分类和/或判断人员的生物特征分类系统,以及通过使用我们身体的数据对个性、性格、政治和宗教信仰做出有问题的推断,相当于人工智能面相学的系统。

LNCS 4561 - 使用多模式技术加强航空维护检查培训
摘要。格林维尔技术学院航空维修技术培训机构(美国南卡罗来纳州格林维尔)与克莱姆森大学(美国南卡罗来纳州克莱姆森)最近通过合作,利用先进的计算机技术显著改善了航空维修技术人员的培训。这些应用包括:大型飞机货舱的 2.5D 和 3D 虚拟环境,交互方式从完全沉浸式(使用头戴式显示器和 6 自由度鼠标)到半沉浸式(使用空间跟踪悬挂式触摸感应窗口显示器)再到非沉浸式(使用基本台式计算机和鼠标);以及涡轮发动机叶片的 3D 虚拟环境,可在其中练习无损检测方法(例如内窥镜检查)。本文讨论了将这些技术整合到现有教育课程中,并提供了有关如何实施和评估此类计划的见解。
SpaceDev 为商业提供技术......
MST-21 设计用于在很宽的电源电压范围内工作,可根据指令提供相干的接收器到发射器操作,并结合相干测距能力以实现精确导航。SpaceDev 指定 MST-21 与 NASA 的全球空间跟踪和数据网络 (STDN) 以及具有 STDN 功能的商业地面站提供商完全兼容,重量不到 1 公斤,尺寸仅为 17 x 11 x 5 厘米(约 7 x 4 x 2 英寸)。MST-21 配备高效的 30% 固态功率放大器 (SSPA),结合可指令的功率输出设置,确保其灵活适应变化的链路条件并支持各种地球轨道和近地任务。将进行测试以确保与各种运载火箭和空间热和辐射环境的兼容性。

基于数字孪生的起重机混合现实界面
在此应用环境中,工作首先确定硬件和软件设置,然后实现和评估原型 - 一个由可视化、交互、通信和注册模块组成的 MR 应用程序。这些模块使应用程序能够充当起重机数字孪生平台(通过起重机 GraphQL 服务器)和用户(通过 HoloLens 界面)之间双向信息交换的桥梁。在一个方向上,起重机数据被处理并显示在用户视图前的虚拟仪表板中以供监控;在另一个方向上,用户可以通过固定或可移动目标控制方法与全息图交互来导航起重机,通过空间跟踪和注册确保了极大的灵活性和移动性。然后对原型进行定量评估,以评估两种控制方法的准确性,测试数据通过误差椭圆体很好地可视化,这表明固定目标控制方法优于可移动方法,方差更低。在工作结束时,提出并阐述了进一步开发 MR 应用程序的六个具体研究主题。
Fox Sports将在商业上推出其AR广播机器人摄像头
Kudan Inc. (headquarters in Shibuya-ku, Tokyo; CEO Daiu Ko) is thrilled to announce that Fox Sports Productions, LLC (headquarters in Los Angeles, USA; CEO Eric Shanks, hereafter “FOX Sports”) has decided to commercially launch its augmented reality (AR) broadcasts robot camera to redefine AR experiences in live sports broadcasting.这项合作将在即将到来的超级碗Lix上首次亮相,Kudan的专利高频3D LIDAR大满贯跟踪软件将为下一代AR增强功能提供动力,为沉浸式体育娱乐活动提供前所未有的观看体验。1。产品发布和协作的详细信息Kudan的实时大满贯技术可以实现超专业的3D空间跟踪,而无需依赖外部定位系统,从而在现场体育中为AR解释了新的可能性。通过将这项技术集成到SkyCam的计算机控制,稳定,有线电视摄像机系统和Fox Sports的广播工作流程中,Kudan将赋予实时AR图形和视觉增强功能,这些图形和视觉增强功能无缝固定在游戏动力学上。

通过模拟太空测量确定和跟踪地月轨道
随着政府和商业航天公司重新关注月球和地月空间,了解在这一空间内航天器和碎片物体的跟踪效果至关重要。这对于主动卫星的空间领域感知 (SDA) 和不受控制物体的飞行安全都很重要。地球轨道上有数以万计的可跟踪物体,而地月空间中的物体可能只有数十个,但地球轨道也是一个传感器非常丰富的环境。各国和各公司花了几十年时间建造跟踪轨道上物体的基础设施。地月空间尚不存在这种基础设施,近年来,研究人员和航天器操作员已开始采用光学跟踪等被动方法来解决地月 SSA 问题。通过地面或空间光学测量估计 GEO 上的航天器状态是一个经过深入研究的问题,并由多家公司和机构实际执行。鉴于低信噪比 (SNR) 观测、月球排斥角、短数据弧和非线性动力学等挑战,在地月空间进行空间跟踪是一个更新颖的问题,这些挑战强调了大多数跟踪滤波器的基本假设和简化。在本研究中,两个地月航天器之间产生角度测量,并根据光学传感器的实际值添加随机角度噪声。这些噪声测量在顺序滤波器中处理,以细化驻留空间物体 (RSO) 随时间变化的 6 维状态和协方差。
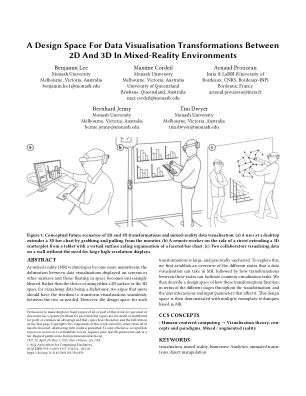
混合现实环境中 2D 和 3D 之间数据可视化转换的设计空间
在计算机图形学出现之前,抽象数据大多以 2D 形式表示,用于报告、书籍或海报的发布。同时,3D 表示仅限于空间数据的物理构造,如地理地球仪、化学、医学或建筑模型。具有合理图形能力的第一波台式计算机导致投射到 2D 屏幕上的 3D 数据表示激增。这可以说导致了 3D 图形的过度使用——例如 Tufte 和其他人非常讨厌的经典免费 3D 图表——早期对 2D 屏幕上 3D 可视化的研究证明了它们的局限性。此后,这导致信息可视化研究界在很长一段时间内围绕 2D 表示巩固信息可视化设计空间,以最佳方式安排 2D 屏幕。近年来,随着混合现实 (MR) 技术的兴起,我们需要重新考虑一些关于数据可视化“自然栖息地”的假设。混合现实 (MR) 耳机,例如 Microsoft HoloLens 2,终于实现了无线、强大的空间跟踪和具有合理视野的高分辨率立体渲染。这些耳机现在还可以了解其环境,映射房间中的表面并跟踪其用户的手势。我们可以渲染在环境中任何表面上明显投射的 2D 类图形,渲染从所述表面明显突出的 2.5D 类图形,或将它们悬浮在我们周围的 3D 空间中 - 所有这些都同样轻松且保真(图 2)。这项新功能为我们提供了沉浸式环境中数据可视化的新设计选择和可能性——也称为沉浸式分析 [ 10 , 41 ]。当然,我们应该继续以最佳方式可视化数据,无论是在 2D 表面还是在 3D 空间中。然而,借助 MR 提供的灵活性,我们可以考虑任何给定的可视化如何在两个环境(表面或空间)之间自由移动,以满足用户的需求。想象一下,只需用手抓住并拉动显示器中的 2D 可视化,即可将一些数据编码到第三空间维度(图 1a),从而将 2D 可视化暂时从显示器中挤出到 3D 中,或者从平板电脑中挤出可视化并将其悬浮在您面前的空间中(图 1b)。这些可视化还可以放置在任意表面上,模仿大型墙壁大小的 2D 显示屏,同时保留 3D 的灵活性(图 1c)。与此相反,我们还可以将 3D 可视化平面化为表面上的 2D,例如通过应用投影或创建横截面视图。在沉浸式环境中支持表面和空间之间的这些转换已被确定为沉浸式分析的重大挑战之一 [17]。虽然最近的工作(第 2 节)已经展示了涉及使用 2D 表面和显示器与 MR 结合进行数据可视化的应用,但我们特别关注可视化