XiaoMi-AI文件搜索系统
World File Search System窑具
具象虚拟地理:身体、空间和数字环境之间的联系
Evans, L. (2018)。虚拟现实的重新出现。劳特利奇。Farman, J.(2020)。移动界面理论:具身空间和定位媒体。劳特利奇。Featherstone, M.,& Burrows, R. (1996)。网络空间/赛博体/赛博朋克:技术具身文化。SAGE。Fox, J.、Bailenson, J. N.,& Tricase, L. (2013)。性化虚拟自我的具身化:普罗透斯效应和经验

阴极主动材料过滤溶液
和NMC是通过过渡金属氢氧化物前体材料的共沉淀,然后用锂化合物的钙化(锂化和氧化)产生的。金属氢氧化物用DI水冲洗以去除钠污染物并干燥。过滤用于去除未溶解的盐,铁污染物和较大的颗粒。将氢氧化锂和金属氧化物混合在一起,并通过在窑中加热来激活材料。一旦激活了凸轮材料区域,然后将其磨碎,以创建指定的粒径分布,并使用磁性过滤器去除铁颗粒。最终的凸轮材料用于创建涂层涂层的浆料,以形成电极。

Silicon N-Channel MOSFET
WSDY06A1Y2N 产品是单节锂离子 / 锂聚合物可充 电电池组保护的高集成度解决方案。 WSDY06A1Y2N 包括了先进的功率 MOSFET ,高精 度的电压检测电路和延时电路。 WSDY06A1Y2N 具有非常小的 SOT-23-5L 封装, 这使得该器件非常适合应用于空间限制得非常小的 可充电电池组应用。 WSDY06A1Y2N 具有过充、过放、过流、短路等所 有电池需要的保护功能,并且工作时功耗非常低。 WSDY06A1Y2N 不仅仅为穿戴设备而设计,也适用 于一切需要锂离子或锂聚合物可充电电池长时间供 电的各种信息产品的应用场合。
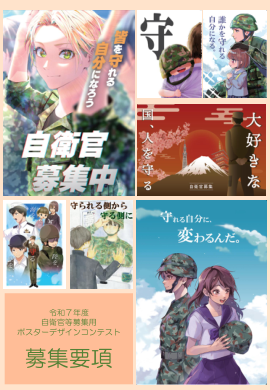
2025 年度自卫队招募海报设计大赛
・JIS标准B3尺寸,纵向或横向,自由纸质,仅限于未发表的原创作品。 - 可以自由地使用颜料(水彩、油画、丙烯等)、粉彩、数码插图、CG 等来表达您的作品。但这仅适用于平面。


外部负载 - 您真正了解多少? - CAA
“还有很多其他问题会导致事故,”Mike Gelskey 说。“而且通常不只是一件事,而是许多因素共同导致了灾难。可能是对负载重量计算不当,加上使用损坏的索具。或者负载低于重心,吊索数量不足,或者挂钩配置不当,再加上强风,导致负载移动并滚出索具。

红外热成像技术实时评估脊柱侧弯矫正器的有效性
摘要:本研究提出了一种创新方法,该方法基于低成本红外热成像 (IRT) 仪器的使用,以实时评估脊柱侧弯支具的有效性。确定脊柱侧弯支具的有效性意味着决定支具对患者背部施加的压力是否足以达到预期的治疗目的。传统上,支具有效性的评估依赖于骨科医生在常规随访检查中进行的经验性定性评估。因此,它在很大程度上取决于相关骨科医生的专业知识。在现有技术中,用于确认骨科医生意见的唯一客观方法是基于对脊柱侧弯随时间进展情况的评估,这通常会使人们暴露在电离辐射下。为了解决这些局限性,本研究提出的方法旨在以无害的方式实时、客观地评估脊柱侧弯支具的有效性。这是通过利用热弹效应并将患者背部的温度变化与支架施加的机械压力相关联来实现的。基于此方法的系统已实施,并通过在一家经认可的骨科中心对 21 名患者进行的实验研究进行了验证。实验结果表明,在区分充足和不足压力方面,分类准确率略低于 70%,鉴于此类系统在骨科中心的临床应用,这是一个令人鼓舞的结果,有望进一步推进。
装配和拆除
前言 6 致谢 6 1.0 简介 7 2.0 本技术指南中使用的关键术语和定义 9 2.1 术语和定义 10 2.2 如何在树艺中使用 kN 值 11 3.0 规划索具操作 13 3.1 简介 14 3.2 风险评估 15 3.3 规划 15 3.4 角色和职责 18 3.5 操作员能力 18 3.6 场地布局 20 3.7 树木状况评估 21 4.0 索具技术 25 4.1 简介 26 4.2 索具点在上方 28 4.3 索具点在下方 32 4.4 其他索具方案 36 4.5 辅助拆除技术 40 4.6 预加载线 41 4.7 机械优势 (MA) 42 5.0锚固力 45 5.1 简介 46 5.2 摩擦力 46 5.3 矢量 47 5.4 锚固力随绳索角度变化 47 5.5 重定向 48 6.0 操作员定位 51 6.1 概述 52 6.2 切割技术 53 7.0 系统组件 57 7.1 概述 58 7.2 硬件组件 59 7.3 纺织组件 59 7.4 模块化组件 59 7.5 连接器 59 7.6 组件类型摘要 60
“我做得更好”:通过脑机接口检查虚拟现实中的具身化对二元运动想象任务中的主体感的影响
基于运动想象的脑机接口 (MI-BCI) 已被提议作为一种中风康复手段,它与虚拟现实相结合,可以将基于游戏的互动引入康复中。然而,MI-BCI 的控制可能难以获得,用户可能会面临糟糕的表现,这会让他们感到沮丧,并可能影响他们使用该技术的积极性。通过增加用户对系统的代理感,可以减少积极性的下降。本研究的目的是了解虚拟现实中描绘的手的化身(所有权)是否可以增强代理感,从而减少 MI-BCI 任务中的挫败感。22 名健康参与者参加了一项受试者内研究,在两种不同的化身体验中比较了他们的代理感:1) 化身手(与身体),或 2) 抽象块。两种表征都以相似的运动闭合以实现空间一致性,并因此弹出气球。手/块通过在线 MI-BCI 控制。每种情况都包括 30 次 MI 激活化身手/块的试验。在每种情况之后,一份问卷调查了参与者的自主感、所有权和挫败感。之后,进行了一次半结构化访谈,参与者详细说明了他们的评分。这两种情况都支持相似水平的 MI-BCI 性能。观察到所有权和自主性之间的显著相关性(r = 0.47,p = 0.001)。正如预期的那样,虚拟手比积木产生更高的所有权。在控制性能时,所有权增加了自主感。总之,基于 BCI 的康复应用程序的设计者可以利用拟人化虚拟形象来对训练过的肢体进行视觉映射,以提高所有权。虽然不能减少挫败感,但只要 BCI 性能足够好,所有权就可以提高感知到的自主性。在未来的研究中,应该在中风患者中验证这些结果,因为他们对自主性和所有权的感知可能与健全用户不同。
![arXiv:2404.03325v2 [cs.RO] 2024 年 9 月 12 日](/simg/5\59c444c99e7e2701f7d7ca4bf915a43724400da7.webp)
arXiv:2404.03325v2 [cs.RO] 2024 年 9 月 12 日
摘要 — 机器人技术一直是提高人类生产力不可或缺的一部分,因为它们一直在帮助人类以快速、准确和高效的方式完成各种复杂且密集的任务。因此,机器人技术已被部署到从个人到工业用例的广泛应用中。然而,当前的机器人技术及其计算范式仍然缺乏具身智能,无法有效地与操作环境交互、以正确/预期的动作做出反应并适应环境的变化。为此,使用脉冲神经网络 (SNN) 的神经形态计算的最新进展已经证明了通过模仿生物大脑工作方式的生物可信计算范式(称为“神经形态人工智能 (AI)”)实现机器人具身智能的潜力。然而,基于神经形态人工智能的机器人领域仍处于早期阶段,因此其开发和部署用于解决现实问题在准确性、适应性、效率、可靠性和安全性等不同设计方面面临新的挑战。为了应对这些挑战,本文将讨论如何从以下几个角度为机器人系统实现具身神经形态人工智能:(P1)基于有效学习规则、训练机制和适应性的具身智能;(P2)节能神经形态计算的跨层优化;(P3)具有代表性和公平性的基准;(P4)低成本可靠性和安全性增强;(P5)神经形态计算的安全性和隐私性;(P6)节能和稳健的神经形态机器人的协同发展。此外,本文还确定了研究挑战和机遇,并阐述了我们对未来机器人具身神经形态人工智能研究发展的愿景。