XiaoMi-AI文件搜索系统
World File Search System立体图

一种基于计算机的测量立体潜伏期的方法......
介绍 视觉深度感知(立体视觉)传统上是通过评估受试者可检测到的最小双眼视差来测试的。然而,事实表明,在日常生活中无法区分单眼和双眼视觉的受试者在视差测试中可能会得分较高(“立体视觉障碍”)。研究发现,产生视觉感知(立体延迟)所需的双眼测试刺激的最短持续时间与日常立体视觉障碍的相关性更高。我们描述了一种评估立体延迟的新方法,该方法不需要除个人计算机(PC)和一副 3D 眼镜(带绿色和红色镜片)以外的特殊仪器。材料和方法受试者舒适地坐在 IBM 兼容 PC 的屏幕前,戴着一副带绿色和红色滤光片(镜片)的 3c0 眼镜。计算机屏幕上以以下方式生成随机点立体图:最初只显示绿点,然后突然添加红点。并在屏幕上持续一段随机设定的可变时间(25-500 毫秒)。时间步长通常为 25 毫秒。每次三次持续 4 秒,双眼刺激总是在这个时间结束时出现。受试者在三次之后按下两个键之一以表示深度知觉的缺失或存在。能够引出 70% 或更多正确答案的最小呈现时间(每个时间步长重复 10 次)被记录为立体延迟。结果到目前为止,已有 7 名 24-45 岁的正常受试者接受了测试。一名受试者未通过测试,无法在任何时间步长上表现得比偶然情况更好。对于其余受试者,平均立体延迟为 250 毫秒(SD=25 毫秒)。结论这似乎是一种有效的、易于实施的协议,用于确定随机点立体图的立体延迟。目前正在改进该程序,以便更精确地测定最小立体潜伏期值,并使正常人和患有神经眼科疾病的患者的值标准化。
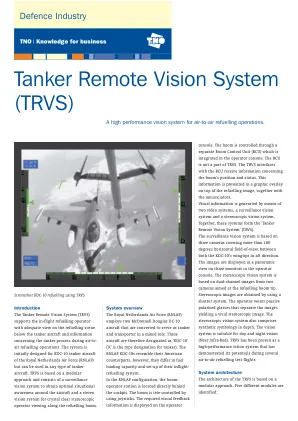
油罐车远程视觉系统
控制台。吊杆通过集成在操作员控制台中的单独吊杆控制单元 (BCU) 进行控制。BCU 不是 TRVS 的一部分。TRVS 与 BCU 接口接收有关吊杆位置和状态的信息。此信息与信号器一起显示在加油图像顶部的图形叠加层中。视觉信息通过两个视频系统、一个监视视觉系统和一个立体视觉系统生成。这些系统共同构成了“加油机远程视觉系统”(TRVS)。监视视觉系统基于三个摄像头,覆盖超过 180 度的水平视野,位于 KDC-10 的两个翼尖之间,在后方。图像以全景视图显示在操作员控制台的三个监视器上。立体视觉系统基于两个瞄准加油杆尖端的摄像机的双通道图像。立体图像是通过使用快门系统获得的。操作员佩戴被动偏光眼镜,将图像分开,从而产生生动的立体图像。立体视觉系统还包括深度合成符号。该视觉系统适用于白天和夜间视觉(近红外)。TRVS 已被证明是一种高性能视觉系统,已在多次空对空加油试飞中展示了其潜力