XiaoMi-AI文件搜索系统
World File Search System第二层

人工智能深度学习 - 计算机科学系
首先,我们学习一层特征检测器,其活动使我们能够重建输入。然后,我们学习第二层特征检测器,其活动使我们能够重建第一层特征检测器的活动。以这种方式学习几个隐藏层之后,我们尝试根据最后一层隐藏层中的活动预测标签,并通过所有层反向传播误差,以便微调最初发现的特征检测器,而无需使用标签中的宝贵信息。预训练可能会提取与最终分类无关的各种结构,但在计算成本低廉且标记数据昂贵的情况下,只要预训练将输入转换为使分类更容易的表示,这就可以了。
退伍军人纪念体育馆和展览馆
在9,455篮球7,890次曲棍球7,672¾房屋通用通用票房5,500¾保留5,500¾房屋保留的房屋保留下来的座椅上,通过使用Blackhout Curtain消除的座位,在9,455篮球7,890篮球7,890篮球7,890篮球7,890篮球7,890篮球7,890篮球7,890篮球7,890篮球7,890篮球7,890篮球7,887中,保留终端9,887 。 门政策在性能前1小时前1小时前1小时预留座位前1个小时,在绩效门政策前1小时。 更改需要董事的书面许可。 加载两个湾加载码头,带有两个码头水平器,并在负载端盖上覆盖的顶篷。 从舞台后面加载约50'。 两个10'和一个14'滚动门。 通过外部驾驶坡道访问建筑物的第二层。 电梯通往第二层和第三层。 索具请参见以下页面的指南和原理图。 圆顶96英尺。 65英尺至天花板的边缘低钢75英尺,高钢96英尺96英尺10.8英尺10.8英尺x 6.5英尺。 39'11英寸从地板上的最高位置篮球地板60英尺x 112英尺整个地板阶段类型ME 500(房屋套装)尺寸4,000平方英尺。 英尺最大18英寸至78英寸(两英寸增量)甲板类型的“ Tech stage”黑色玻璃纤维frp表面在4'x 8'部分中,在6'x 8'deck(SICO)的6'x 8'deck(Sico)的甲板(停滞)瓷砖表面下50%的未打扰英尺。在42英寸的障碍物120'ft。(停滞)障碍物200英尺。钢制人群控制路障,带电线网100英尺100英尺。自行车挂钩窗帘全剧院窗帘,包括边界,腿部,表演和后方。。门政策在性能前1小时前1小时前1小时预留座位前1个小时,在绩效门政策前1小时。更改需要董事的书面许可。加载两个湾加载码头,带有两个码头水平器,并在负载端盖上覆盖的顶篷。从舞台后面加载约50'。两个10'和一个14'滚动门。通过外部驾驶坡道访问建筑物的第二层。电梯通往第二层和第三层。索具请参见以下页面的指南和原理图。圆顶96英尺。 65英尺至天花板的边缘低钢75英尺,高钢96英尺96英尺10.8英尺10.8英尺x 6.5英尺。 39'11英寸从地板上的最高位置篮球地板60英尺x 112英尺整个地板阶段类型ME 500(房屋套装)尺寸4,000平方英尺。英尺最大18英寸至78英寸(两英寸增量)甲板类型的“ Tech stage”黑色玻璃纤维frp表面在4'x 8'部分中,在6'x 8'deck(SICO)的6'x 8'deck(Sico)的甲板(停滞)瓷砖表面下50%的未打扰英尺。在42英寸的障碍物120'ft。(停滞)障碍物200英尺。钢制人群控制路障,带电线网100英尺100英尺。自行车挂钩窗帘全剧院窗帘,包括边界,腿部,表演和后方。高24英尺,距固定板条位置60英尺。 Intercom清除COU CUE系统功率200&400 AMP 3Phz 208V阶段右/左90英尺和160英尺,距离上台中心(请参阅图)高24英尺,距固定板条位置60英尺。Intercom清除COU CUE系统功率200&400 AMP 3Phz 208V阶段右/左90英尺和160英尺,距离上台中心(请参阅图)

使用人工智能面部识别自动开门
MTCNN(多任务级联神经网络)可检测图像/视频中的面部和面部特征点。该方法由他们的论文[8]在参考文献中提出。MTCNN 的整体概念可分为三个层次,其中,在三分之一层次中,面部检测和面部特征点同时完成。这些层次包括具有不同复杂度的不同 CNN。MTCNN 三个层次的更简单解释如下:在第一层,MTCNN 创建多个帧,从左上角开始扫描整个图像,最终向右下角前进。数据检索系统称为 P-Net(提议网络),这是一个浅层、完全相关的 CNN。在第二层,来自 P-Net 的所有数据都用作 CNN 的下一层 R-Net(细化网络)的输入,这是一个完全相关的复杂

含空调资源的智能微电网电池储能系统优化配置
摘要 —在光伏高渗透率的微电网中,电池储能系统 (BESS) 的优化定型是近年来的热门研究课题。同时,目前空调家庭的高能耗也受到越来越多的关注。本文针对具有光伏系统和空调资源的智能微电网开发了一种 BESS 优化定型方法。所提出的模型分为两层。在第一层中,考虑光伏输出功率和空调家庭的热缓冲特性来确定 BESS 的初始规模。在第二层中,提出 BESS 的最优规模以最小化系统总成本,包括 BESS 建设投资和微电网系统运行成本。该模型采用差分进化算法和迭代算法进行求解。案例研究证明了所提出方法的有效性。
区域结构计划和邻里计划参考条款
第二层是必须位于批准的区域结构计划中的邻里计划。nps将涵盖64公顷土地的大约面积,并且可能在区域变化至酌处权。邻里计划必须解决区域结构计划中的政策(与蓬勃发展保持一致),同时提供其他实施细节,例如但不限于土地利用名称,邻里设计,人口和住宅单位密度的统计数据,公园分类和公路网络。邻里计划将直接与土地使用章程有关,并为未来的细分和重新分配申请提供信息。作为NP是一份技术文件,NP的决策机构是计划和发展的主管。NP审查和批准不是公开程序,但是,经过批准,NP将在该市的网站上公开查看。

高级电池热管理的进步 -
锂离子电池由于其高能量密度和延长周期寿命而经常用于电动汽车。保持正确的温度范围至关重要,因为锂离子电池的性能和寿命对温度高度敏感。本研究讨论了在这种情况下实用的电池热控制系统。在这项工作中回顾了热产生的现象和锂离子电池的重大热问题。然后,根据热周期的可能性对各种电池热管理系统(BTM)的研究进行彻底分析并分为组。直接制冷剂两相冷却,第二层液体冷却和机舱空气冷却都是BTM的组成部分。相变材料冷却,热管冷却和热电元件冷却是BTMS的未来部分。每个BTM都检查了电池的最高温度和最高温度差异,并讨论了解决每个系统缺点的合适BTM。最后,建议新型的BTMs作为具有高能量密度的锂离子电池的实用热管理解决方案。

Sirindhorn国际技术学院Thammasat University
第二座SIIT建筑与第一座SIIT建筑物是一座五层高级实验室建筑,总面积约为3,000 m 2。它是由Keidanren和FTI奉献于1998年10月6日的SIIT。高级实验室大楼I拥有实验室,用于进行四年级学生的高级项目,研究生的研究工作以及教职员工的研究项目。第三座SIIT建筑物Edutivity是一栋四层楼的建筑物,与第二个建筑物相邻,总面积约为1,500 m 2。该建筑物设有一个学生活动中心和一楼的建筑物和地面部门的办公室,以及第二层,三楼和四楼各种规模的教室。一款新的8层高级实验室大楼II,总面积约为7,000 m 2,配备了高级实验室和研究设备,这对于由教职员工,研究生和高年级本科生进行高级研究人员来说是必要的。
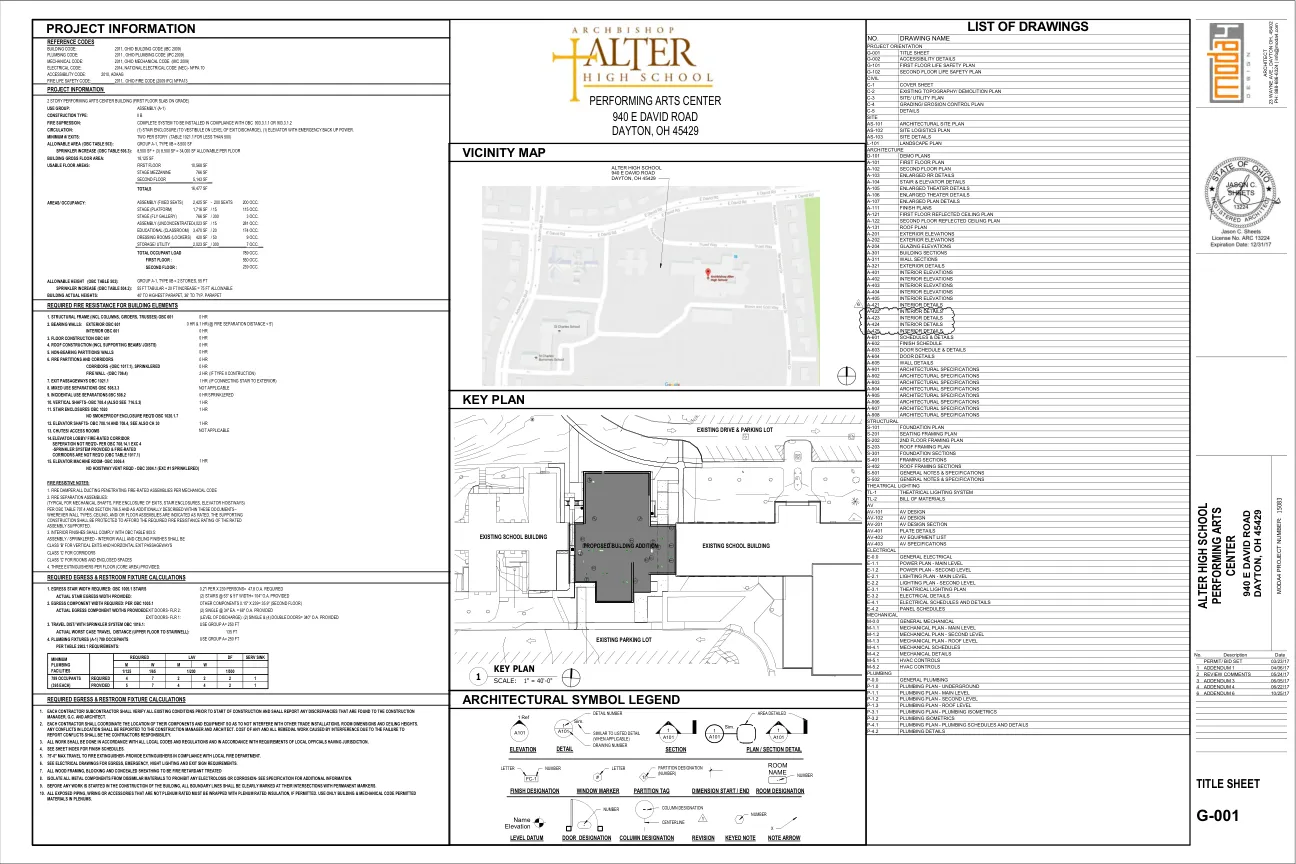
图纸清单 - 护舷结构
附图清单编号图纸名称 项目方向 G-001 标题页 G-002 无障碍设施详情 G-101 一楼安全规划图 G-102 二楼安全规划图 土木工程 C-1 封面页 C-2 现有地形/拆除规划图 C-3 场地/公用设施规划图 C-4 坡度/侵蚀控制规划图 C-5 场地详情 AS-101 建筑场地规划图 AS-102 场地物流规划图 AS-103 场地详情 L-101 景观规划图 建筑 D-101 演示规划图 A-101 一楼规划图 A-102 二楼规划图 A-103 放大 RR细节 A-104 楼梯和电梯细节 A-105 放大的剧院细节 A-106 放大的剧院细节 A-107 放大的平面细节 A-111 完成平面图 A-121 一楼反射天花板平面图 A-122 二楼反射天花板平面图 A-131 屋顶平面图 A-201 外部立面图 A-202 外部立面图 A-204 玻璃立面图 A-301 建筑剖面图 A-311 墙壁剖面图 A-321 外部细节 A-401 内部立面图 A-402 内部立面图 A-403 内部立面图 A-404 室内立面图 A-405 室内立面图 A-421 室内细节 A-422 室内细节 A-423 室内细节 A-424 室内细节 A-425 室内细节 A-601 进度表和细节 A-602 完成进度表 A-603 门进度表和细节 A-604 门细节 A-605 墙壁细节 A-901 建筑规格 A-902 建筑规格 A-903 建筑规格 A-904 建筑规格 A-905 建筑规格 A-906 建筑规格 A-907 建筑规格 A-908 建筑规格 结构 S-101 基础平面图 S-201 座位框架平面图 S-202 二楼框架平面图 S-203 屋顶框架平面图 S-301 基础剖面 S-401 框架剖面 S-402 屋顶框架剖面 S-501 一般说明和规格 S-502 一般说明和规格 舞台照明 TL-1 舞台照明系统 TL-2 物料清单 AV AV-101 AV 设计 AV-102 AV 设计AV-201 AV 设计部分 AV-401 板详细信息 AV-402 AV 设备列表 AV-403 AV 规格 电气 E-0.0 一般电气 E-1.1 电源平面图 - 主层 E-1.2 电源平面图 - 第二层 E-2.1 照明平面图 - 主层 E-2.2 照明平面图 - 第二层 E-3.1 舞台照明平面图 E-3.2 电气详细信息 E-4.1 电气计划和详细信息 E-4.2 面板计划 机械 M-0.0 一般机械 M-1.1 机械平面图 - 主层 M-1.2 机械平面图 - 第二层楼层 M-1.3 机械平面图 - 屋顶层 M-4.1 机械明细表 M-4.2 机械细节 M-5.1 HVAC 控制 M-5.2 HVAC 控制 管道 P-0.0 一般管道 P-1.0 管道平面图 - 地下 P-1.1 管道平面图 - 主楼层 P-1.2 管道平面图 - 第二楼层 P-1.3 管道平面图 - 屋顶层 P-3.1 管道平面图 - 管道等距图 P-3.2 管道等距图 P-4.1 管道平面图 - 管道明细表和细节 P-4.2 管道细节
