XiaoMi-AI文件搜索系统
World File Search System简介
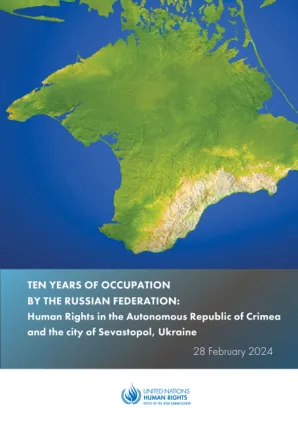
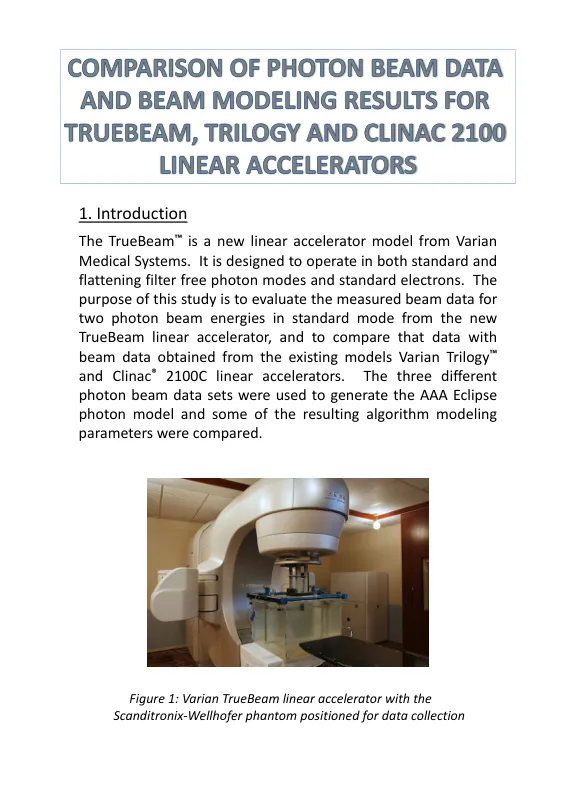
简介
1。2024年2月26日,自从抗议者在辛菲罗波尔发生冲突以来,有10年将过去十年来,报道说,克里米亚自治共和国议会将安排与乌克兰分离的投票。在这些冲突发生前几天,基辅的迈丹抗议活动已经到达了一个先端,导致当时的乌克兰维克多·亚努科维奇总统离开,并建立了乌克兰临时政府。到2014年2月27日,没有徽章的武装人员接管了克里米亚地方政府的建筑物。在枪手在场的情况下,克里米亚议会的成员继续驳回地方政府,并选出了新的“克里米亚负责人”。到2014年3月21日,俄罗斯联邦1的一系列政治决定导致了克里米亚暂时占领的自治共和国和乌克兰塞瓦斯托波尔市的非法吞并(以下是“克里米亚”)。2014年3月27日,联合国大会在其第68/262号决议中肯定了其对乌克兰在国际公认的边界和其他事物中的主权,政治独立,团结和领土完整性的承诺,除其他外,还强调了16日在16日举行的公投没有任何责备的状态,并没有任何反应。2



1简介
难题长期以来一直被认为是吸引人的精神挑战,这些挑战在整个历史上都吸引了个人。他们提供休闲和转移机会,并刺激认知技能,例如批判性思维和解决问题[3]。此外,由于与数学和计算理论的关键问题的紧密联系,在过去的二十年中,拼图的理论方面引起了科学界的重大兴趣,从而对其数学和计算方面进行了广泛的研究(参见[4-6],请参阅[4-6]的广泛研究)。Furthermore, a variety of pencil-and-paper-based puzzles have been confirmed NP-complete, including but not limited to (in chronological order): Nonogram (1996) [7], Sudoku (2003) [8], Nurikabe (2004) [9], Heyawake (2007) [10], Hashiwokakero (2009) [11], Kurodoko (2012) [12], Shikaku and Ripple Effect(2013)[13],Yosenabe(2014)[14],Fillmat(2015)[15],Dosun-Fuwari(2018)[16] [16],Tatamibari(2020)[17] [17],Kurotto和Juosan和Juosan(2020)[18] [2]。suguru难题的NP完整性意味着有一个多项式时间验证过程,用于检查任意配置是否是Suguru实例的解决方案。但是,解决Suguru拼图仍然是指数的任务,因为对于任何NP完整问题,都不存在已知的多项式时间算法。此外,用于解决Suguru难题的正式算法研究相对有限,因为它直到最近才证明NP完整。本文讨论了一种基本方法,即回溯方法,通过修剪优化增强。对基本算法方法(例如详尽的搜索和修剪和搜索)的研究(这些方法都采用了本文中使用的方法的类似方法)是在Yin-Yang [21]和Tatamibari等难题上进行的。更先进的技术也可用于求解NP完整的难题,例如SAT求解器[23,24]和深度学习方法[25]。这种方法证明了其解决任何Suguru拼图的能力,需要解决的解决方案在拼图大小和提示数方面增加了阶乘因素。此外,这个最终项目还探索了一种使用基于SAT的方法来解决Suguru难题的替代方法。除此之外,本文


简介
SCIENTIFIC AND TECHNICAL SUBCOMMITTEE MEMBERS AND CO-AUTHORS (ALPHABETICALLY): Linda Bacon 4 , Hannah Baranes 5 , Andrew Barton 6 , Sean Birkel 7 , Damian Brady 8 , Lily Calderwood 9 , Gail Carlson 10 , Alexandra Contosta 11 , Amanda Cross 12 , Adam Daigneault 19 , Phillip deMaynadier 14 , Muhammad Drammeh 15 , Susan Elias 16 , Alison Gardner 17 , Andrew Goode 8 , Caleb Goossen 18 , Daniel Hayes 19 , Glenn Hodgkins 20 , Cindy Isenhour 21 , Andrew Johnson 4 , Eileen Johnson 22 , Joe Kelley 7 , Mark King 4 , Glen Koehler 9 , Jason Lilley 9 , Rebecca Lincoln 23 , Pamela Lombard 20 , Bradfield Lyon 7 ,凯瑟琳·米尔斯(Katherine Mills)5,托德·奥特尔(Todd Ontl 24),尼科尔(Nichole)价格25,克里斯汀·普莱(Kristen Puryear)26,达伦·兰科(Darren Ranco)27,尼古拉斯(Nicholas)记录25,乔纳森·鲁宾(Jonathan Rubin)28,乔纳森·鲁宾28,雷切尔·夏特曼29,彼得·斯洛文斯基2,彼得·斯洛文斯基2,艾丽莎斯·苏西州2,艾丽莎·苏西州30,萨利·斯托克威尔31,萨利·斯托克威尔31,卡纳·托克纳加5号

1简介
然而,对于所有成功,这些商业机器人都遭受了根本的缺点:缺乏流动性。固定的操纵器的运动范围有限,取决于将其螺栓固定在哪里。相比之下,移动机器人将能够在整个制造工厂中旅行,并在最有效的地方灵活地应用其才能。本书重点关注移动性技术:移动机器人如何在现实世界环境中移动以完成其任务?第一个挑战是运动本身。移动机器人应该如何移动,而特定的运动机器人是什么使其优于替代运动机制?敌对的环境(例如火星)触发了更异常的运动机制(图1.2)。在危险和荒凉的环境中,即使在地球上,这种远程手工的系统也广受欢迎(图。1.3、1.4、1.5 1.6,)。在这些情况下,机器人的低级复杂性通常使人类操作员不可能直接控制其动作。人类执行本地化和认知活动,但依靠ROBOT的控制方案来提供运动控制。例如,Plustech的步行机器人提供自动腿部协调,而Human Operator选择了整体旅行方向(图1.3)。图1.6描绘了一个