XiaoMi-AI文件搜索系统
World File Search System系统参数
![arXiv:2003.01854v1 [nlin.AO] 2020 年 3 月 4 日](/simg/e\e4fdb0afb9d5d176aa4856723be3dbc7d7233b88.webp)
arXiv:2003.01854v1 [nlin.AO] 2020 年 3 月 4 日
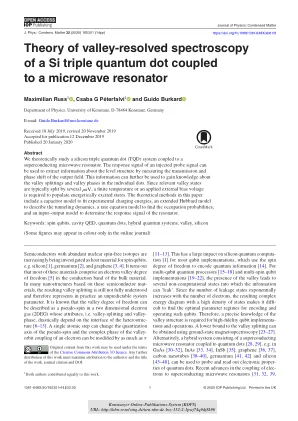
图 2:图 1 所示的混合耦合神经元群体中,随着化学连接数 S 的变化和电连接数 R 的固定,出现了不同的动力学行为。每行分别显示网络环中两个相邻神经元(用红色和绿色箭头标记)和一个远处神经元(用蓝色箭头标记)在 V − w 相平面上的时空活动模式、膜电位快照、平均发放频率曲线和具有瞬时位置的周期轨道。化学连接数设置为 S = 5 (A)、S = 125 (B)、S = 250 (C) 和 S = 350 (D)。其他系统参数固定为 gc = 10 − 2 mS/cm 2、ge = 10 − 7 mS/cm 2 和 R = 100。

欧洲空中导航安全组织民事/军事合作
该系统支持 2 级和 3 级的长期事件规划和空域管理 - 包括空域激活的实时协调。将国家 LARA 系统连接到邻近的 LARA 系统的能力允许不同国家之间进行无缝协调,并促进高效的跨境运营。与其他系统和网络管理器的各种接口可以改善协作决策。LARA 提供用户友好的界面,允许在线空域预订,实现透明协调并最大限度地实现日常任务的自动化。通过共享的实时空域状态显示,增强了所有参与者的态势感知,并提高了飞行安全性。该系统旨在允许配置所有相关系统参数以适应国家程序,同时有助于协调欧洲灵活使用空域概念的应用。
欧洲空中航行安全组织民事/军事合作
该系统支持 2 级和 3 级的长期事件规划和空域管理 - 包括空域激活的实时协调。将国家 LARA 系统连接到邻近 LARA 系统的能力可实现不同国家之间的无缝协调,并促进高效的跨境运营。与其他系统和网络管理器的各种接口可改善协作决策。LARA 提供用户友好的界面,允许在线预订空域,实现透明协调并最大限度地实现日常任务的自动化。通过共享的实时空域状态显示,所有参与者的态势感知得到增强,飞行安全得到改善。该系统旨在允许配置所有相关系统参数以适应国家程序,同时有助于协调欧洲灵活使用空域概念的应用。

自我增强的选择性旋转离合器的可行性分析
摘要 - 基于线性电嵌入离合器材料和性能的最新进步,本文使用一个简单的模型研究了自我增强的选举旋转离合器的可行性。该设计旨在在性能受到传统电磁或磁性离合器提供的扭矩和扭矩与质量比的限制的应用中提供改进。自我增强设计的性能与设备的几何参数有关,因此通过将系统参数建模为具有随机属性来检查离合器配置的鲁棒性。根据陀螺仪平衡辅助设备的离合器要求进行了一个设计示例。分析预测,与行业领先的旋转离合器相比,提出的设计可以实质性改善扭矩与质量比率。索引术语 - 关键,选举,自我增强,磨损机器人技术

Ali Abu - Nada* 有限资源下氢分子基态能量的量子计算模拟
摘要:本文采用基于量子变分原理的算法计算了氢分子基态能量。由于本研究的系统(即氢分子)相对较小,因此使用模拟器可以有效地经典模拟该分子的基态能量,因此通过模拟器计算得到了氢分子基态能量。本文阐述了该算法的完整细节。为此,本文给出了费米子 - 量子比特和分子哈密顿量 - 量子比特哈密顿量变换的完整描述。作者寻找产生系统最小能量的量子比特系统参数(θ 0 和 θ 1 ),并研究了基态能量与分子键长的关系。与 Kandala 等人的电路相比,本文提出的电路很简单,不包含很多参数,作者只控制两个参数(θ 0 和 θ 1 )。
与微波谐振器耦合的硅三量子点谷分辨光谱理论
含有丰富核自旋无同位素的半导体越来越多地被研究用作自旋量子比特的主体材料,例如硅[1]、锗[2]和石墨烯[3,4]。结果表明,大多数此类材料在块体材料导带中都包含一个电子谷自由度[5]。在基于这些半导体材料的许多纳米结构中,由此产生的谷分裂仍未完全了解,因此在实践中代表了一个不可预测的系统参数。已知谷自由度可描述为二维电子气(2DEG)中的伪自旋,其属性(即谷分裂和谷相)极大地取决于异质结构的界面[6-13]。单个原子步骤可以改变伪自旋的量化轴,并且电子的谷轨道耦合的复相位可以被修改多达π
![arxiv:2405.08642v2 [cond-mat.mes-hall] 2025年1月8日](/simg/3\3e4c254c907ce8c7e803c4f04a49f075b7c30036.webp)
arxiv:2405.08642v2 [cond-mat.mes-hall] 2025年1月8日
我们考虑二维电子气体与量化的腔模式相互作用。我们发现电子和腔中光子之间的耦合会增强超导间隙。至关重要的是,与更幼稚的方法相比,PEIERLS阶段中的所有术语都保持鲜明对比,这可能导致虚假的超级级相变。我们使用平均场理论来表明差距与空腔耦合强度大致线性增加。可以通过扫描隧道显微镜(STM)测量值(STM)的测量值(或者对于Moir'E系统的薄片)(由于较大的晶格由于较大的晶格会更明显)与局部结构的电磁场形式相互作用,因此可以在本地观察到效果。我们的结果也与与腔模式相互作用的量子光学设置与量子光学设置有关,在该模式下,晶格的几何形状和系统参数可以在广泛的范围内调节。

动态系统识别 - 飞机应用第 2 部分
5.2 系统参数状态估计问题分解的影响 5.3 频域中线性系统的输入信号优化 5.3.1 频域中的 Fisher 信息矩阵 5.3.2 信息空间中信息矩阵的表示 5.4 利用凸分析计算最优输入信号 5.4.1 凸分析的应用 5.4.2 谐波输入信号 5.4.3 输入设计的全局最优性 5.5 谐波输入信号的优化 5.5.1 梯度法的应用 5.5.2 谐波输入信号的组合 5.5.3 消除多余的谐波输入信号 5.6 结论 最优输入信号的设计和评估 6.1 时域输入设计 6.1.1 DUT 纵向输入信号的设计 6.1.2 DUT 横向输入信号的设计6.1.3 Doublet、3211、Mehra 和 Schulz 输入信号
— HMRC | 纽卡斯尔 – 英国 100 万平方英尺中央控制...
例如,如果有 3 个锅炉可用,则一个锅炉发生故障对于维持 KPI 并不重要。但是,如果同时有 2 个锅炉发生故障,则被视为非常关键,因为在早晨开始之前可能很难恢复到最佳温度。如果在正常工作时间之外发生严重警报,Astral 局工程师将远程连接到 BEMS。然后,工程师将分析和查询警报和系统参数,并进行任何更改以远程纠正问题。如果无法远程解决问题,Astral 工程师将联系 Interserve FM 24 小时维护帮助台并立即通知他们。如果问题需要 BEMS 控制工程师出席,Astral 将派遣其值班工程师并通知安全人员和 Interserve FM 维护帮助台。如果问题似乎是机械故障,Astral 将通知 Interserve 采取进一步行动,然后将所有警报数据和采取的行动的电子邮件转发给 Interserve FM Estates 团队。

开发用于小型无人机跟踪的外围-中央视觉系统
两种基于图像的传感方法被融合以模拟人类视觉,以支持空中检测和避免以及反无人机系统应用。在所提出的传感系统架构中,外围视觉摄像头(带鱼眼镜头)提供大视野,而中央视觉摄像头(带透视镜头)提供特定目标的高分辨率图像。除了两个摄像头和支持算法的互补能力以实现被动检测和分类之外,这对摄像头还形成了一个可以支持距离分辨率的异构立体视觉系统。本文介绍了一种新型外围 - 中央视觉系统的开发和测试,该系统用于检测、定位和分类空中威胁。该系统用于生成各种模拟威胁的数据集,以便通过实验验证威胁定位误差的参数分析。还描述了基于蒙特卡罗模拟的系统性能分析,进一步深入了解了系统参数对威胁定位精度的影响。