XiaoMi-AI文件搜索系统
World File Search System绘画

文字画布:用单词绘画绘画
项目图像处理应用程序的重点是创建一个集成了基于AI的图像处理功能的用户友好平台。该应用程序具有两个主要模块:文本到图像生成和背景删除。文本到图像模块利用稳定的扩散模型根据文本描述生成高质量的图像,从而促进创意工作流程。背景删除模块利用remove.bg API有效地细分并从现有图像中删除背景。使用Python和Pyqt5开发,该应用程序旨在简化技术和非技术用户的复杂图像处理任务。测试结果表明性能强劲,高质量的产出和用户满意度,证明了AI驱动工具在增强图形设计,营销和社交媒体等行业之间提高生产力和创造力方面的潜力。
BGP:绘画服务
“我们将提前通知投标人,其投标将通过邮寄方式发送至以下地址,并必须在 4 月 23 日星期二中午 12:00 之前到达。请注意,您必须提前通过邮件通知我们您的投标。 如果您希望参加投标,您必须于4月17日星期三中午12点之前通过传真或其他方式提交市场价格调查文件。 投标者必须同意《驻军标准合同》及《投标及签订合同指南》(东部陆军会计司令部网站(https://www.easternarmy.gov/gsdf/eae/kaikei/eafin/index.html)或在泷原驻军会计司令部办公室公布)后才能参与投标。 通过提交出价,您将被视为已经做出了“关于消除有组织犯罪的承诺”中规定的承诺。投标文件中应当包含下列声明作为接受的表示: “本公司(本人(若为个人)、本组织(若为组织))谨此承诺本承诺书中所列的有关排除有组织犯罪的事项。”请注意,如果您拒绝提交上述“有关排除有组织犯罪的承诺事项”中所列的书面承诺,您将无法参与投标。(k)如果在首次投标中有通过邮寄方式提交投标的投标人,则重新投标的时间如下:


•一般•电池和充电•绘画,护理...
我可以在一个组中控制多个产品吗?例如,我可以用一个按钮按下打开/关闭门玻璃吗?是。HubSpace™允许您将产品分组放置并控制在一起。可用的控件将由您在小组中放置的不同产品确定。例如:•如果创建一个由具有类似控件的产品组成的组,例如智能门,则可以操作该组的许多功能。在这种情况下,您将能够管理ON/OFF功能。•如果您创建了一个由具有不同类型控件的产品组成的组,例如智能门,智能插头和吊扇,您将只能操作所有产品共有的控件。

细胞绘画的演变和影响
图 1. 使用细胞绘画分析进行形态分析。a) 细胞绘画分析的示意图;将细胞孵育并扰动,然后应用一组六种染色剂。然后通过自动显微镜获取图像,然后分割细胞核和细胞体。b) 使用适当的软件或基于深度学习的方法测量或计算图像中的形态特征。c) 特征预处理后,执行下游分析。这包括各种方法,包括监督和无监督机器学习,以更好地阐明化合物的生物学效应,例如其 MoA 或安全性。

绘画音乐:利用人工智能创作……
本文介绍了人工智能 (AI) 技术的发展,该技术可实时监控绘画或素描的演变,并在画布上艺术品的演变过程中产生与艺术各个元素相关的音符。本文介绍了实时捕捉艺术品演变所需的实用方法,然后介绍了用于建立视觉艺术与音乐之间关联的框架。人工智能技术利用这两种不同艺术形式中的相似之处,以响应实时绘画元素并产生反映艺术品演变发展的音乐音符。该系统的原型已在 2019 年阿伯丁五月节的现场舞台表演中实施,其叙事围绕“人工智能是好是坏?”这一问题展开。该项目的其他成果包括一部 20 分钟的电影和一组受人工智能启发和启发的数字平台和画廊环境的(有形)视觉艺术品。通过人工智能将这些学科整合在一起,将静态艺术形式转变为动态、交互、变革、短暂和暂时的艺术形式。

分散的细胞形态绘画 - morphodiff
在岛上(env a -env d)和高度的三维表示,并标有El Teide Stratovolcano的峰值。G。G的近似分布。 Eisentrauti和G. G。与红线一起用黑线和系统发育进化枝分开(Thorpe等人1993; Richard&Thorpe 2001;布朗等人。 2006)。 G. G。 Insulanagae仅发生在近海胰岛Roque de Fuera de Anaga上。 采样区域显示了黑色圆圈,用于基因型环境协会(GEA)的南北采样区域以蓝色为彩色。1993; Richard&Thorpe 2001;布朗等人。2006)。G. G。 Insulanagae仅发生在近海胰岛Roque de Fuera de Anaga上。 采样区域显示了黑色圆圈,用于基因型环境协会(GEA)的南北采样区域以蓝色为彩色。G. G。 Insulanagae仅发生在近海胰岛Roque de Fuera de Anaga上。采样区域显示了黑色圆圈,用于基因型环境协会(GEA)的南北采样区域以蓝色为彩色。
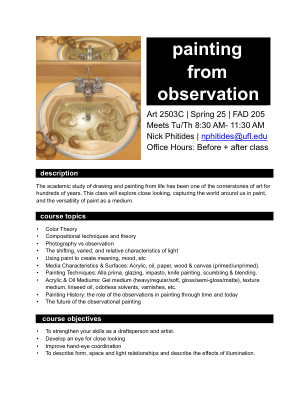
观察绘画 - 佛罗里达大学艺术学院
课程主题 • 色彩理论 • 构图技巧与理论 • 摄影与观察 • 光的变化、变化和相对特性 • 用颜料创造意义、情绪等 • 媒介特性与表面:丙烯、油画、纸、木头和画布(上底漆/未上底漆)。 • 绘画技巧:直接法、上光、厚涂法、刀画、涂抹法与混合法。 • 丙烯与油画介质:凝胶介质(重/普通/软、光泽/半光泽/哑光)、纹理介质、亚麻籽油、无味溶剂、清漆等。 • 绘画史:观察在古往今来绘画中的作用 • 观察绘画的未来 课程目标 • 加强您作为绘图员和艺术家的技能。 • 培养近距离观察的能力 • 提高手眼协调能力 • 描述形式、空间和光线关系并描述照明效果。