XiaoMi-AI文件搜索系统
World File Search System维护连

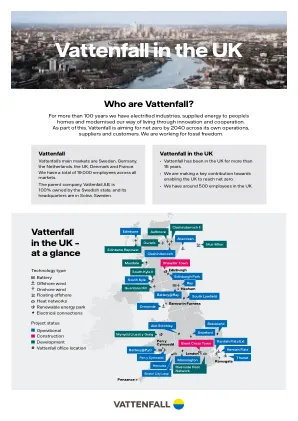
英国的Vattenfall英国的Vattenfall
vattenfall Idno是OFGEM监管的独立分销网络运营商。我们拥有并维护连接到英国国家分销网络的电气网络基础架构,并为50多个商业网格连接提供了电力。
英国的Vattenfall英国的Vattenfall
vattenfall Idno是OFGEM监管的独立分销网络运营商。我们拥有并维护连接到英国国家分销网络的电气网络基础架构,并为50多个商业网格连接提供了电力。
ATP 4-33,维护操作
第四部分 – 旅战斗队维护支援 ...................................................................................... 2-15 旅支援营 .............................................................................................................. 2-15 旅战斗队中的旅支援营 .............................................................................. 2-16 支援旅中的旅支援营 ...................................................................................... 2-17 野战炮兵旅中的总部和服务连 ...................................................................... 2-19 步兵或空降特遣部队支援连 ............................................................................. 2-21 野战维护连 ............................................................................................................. 2-23 前方支援连 ............................................................................................................. 2-26 野战维护队 ............................................................................................................. 2-28 +维护激增队 ............................................................................................................. 2-28
2023年环境、社会及管治报告
Crown Castle 成立于 1994 年,在美国各大市场开展业务,建设、运营和维护连接人、社区和企业所必需的通信基础设施。我们深知,连通性是公共安全、学习、就业、交通和许多使社区繁荣发展的服务的生命线。作为一家房地产投资信托 (REIT),我们通过与客户(领先的美国无线运营商和其他企业)签订长期合同,租赁共享通信基础设施上的空间。我们的业务模式建立在这样一个理念之上:在多个客户之间共享单一资产不仅具有经济意义,而且也是满足日益增长的连接需求的可持续方式。这不仅使我们的客户及其服务的社区受益,也代表了我们长期以来的 ESG 承诺。
丹尼尔·塞特福德上校
丹尼尔·塞特福德上校 货运直升机项目负责人 丹尼尔·R·塞特福德上校是德克萨斯州欧文市人。他于 2000 年 8 月毕业于达拉斯大学,后来通过预备役军官训练团被任命为航空军官。2002 年,塞特福德上校从阿拉巴马州拉克堡飞行学校毕业后,最初被分配到第 6 骑兵团第 3 中队,担任韩国汉弗莱斯营的攻击排长和 III/V 级排长。后来,他加入了坎贝尔堡第 101 航空团第 1 营,并于 2005 年至 2006 年期间作为营 S-4 被派往伊拉克。2006 年,塞特福德上校返回拉克堡参加航空上尉职业课程。毕业后,塞特福德上校移居德克萨斯州胡德堡,指挥第 4 步兵师第 4 战斗航空旅第 4 营 D 连,这是一支 AH-64D 阿帕奇维护连,他随后再次随该连前往伊拉克。担任指挥官后,塞特福德上校于 2010 年参加了阿拉巴马州亨茨维尔的陆军采购基础课程。随后,他于 2011 年完成中级教育 (ILE),2012 年获得达拉斯大学神学研究硕士 (MST) 学位,并于 2023 年完成空军战争学院课程。他目前担任货运直升机项目办公室的项目负责人。塞特福德上校的奖章和装饰包括带橡树叶簇的铜星勋章、带两个橡树叶簇的功绩服务勋章、带两个橡树叶簇的陆军嘉奖勋章、带两个橡树叶簇的陆军成就勋章、功绩单位奖章和飞行员徽章。Thetford 上校的收购任务包括担任航空和导弹研究、开发和工程中心 (AMRDEC) 的现任运营官和 AMRDEC 主任的执行官;高级威胁红外对抗 (ATIRCM) 计划的助理产品经理 (APdM);美国陆军特种作战航空司令部(空降)[USASOAC (Abn)] G-8 的航空和系统协调员;攻击部门负责人、TRADOC 侦察和攻击能力经理 (TCM-RA);以及 PEO 航空的 UH-60V 产品经理。