XiaoMi-AI文件搜索系统
World File Search System翅膀
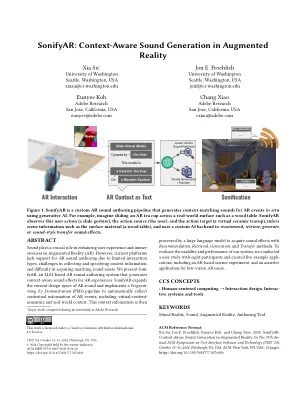
Sonifyar:增强现实中的上下文感知声音
(1)有限的现实世界上下文。现有系统通常支持链接到AR中虚拟对象的动作触发器,但缺乏对现实世界上下文信息的支持(例如,,一种虚拟玩具机器人,穿越木材,地毯或玻璃等多样化的室内表面。(2)有限的交互规范。现有系统仅提供预定义的交互触发器,例如“ TAP”和“接口输入”。这限制了创建者在提供的选项之外指定交互的能力,尤其是涉及环境环境的选项(例如,用户在现实世界中“幻灯片”虚拟粉笔在现实世界黑板上滑动)。(3)有限的声音来源。现有系统受其图书馆中可用的声音资产的限制以及在线合适的声音资源的稀缺性。因此,AR的作者努力为不同的AR事件找到适当的声音(例如,复制虚拟蜻蜓的翅膀颤动或模拟虚拟恐龙的饮食声音)。

支撑架机翼和箱形翼配置。未来...
翼梁,肋骨和字符串也是由支柱支撑的版本。的差异在于一个事实,即通过张力吸收一部分载荷(如果存在高翼的配置,如图2所示)或压缩(如果是低翼构造)。这意味着机翼的结构可以更轻,甚至可能在相同数量的质量方面更大[1]。这意味着在结构上更轻,更长,更薄的翅膀具有较高的细长度,从而提高了空气动力学效率或L/D比。此外,提高的效率将意味着飞机还需要减少燃料,从而减轻重量。,尽管这种配置也有一些缺点,因为支撑杆本身也增加了飞机的质量,并增加了飞机湿润的表面,从而增加了其寄生虫的阻力。也必须注意干扰和添加的结构复杂性,并且这种配置可能导致的空气弹性问题[2]。对于短途飞机来说,这种设计特别有趣,其中更具空气动力的机翼可以提供更高的攀爬速度和更滑的CD(连续下降)。

大型生物力学空间结构DARPA-SN-25-51 ...
鉴于代谢工程的最新进展,用于快速生长,具有新颖性能的极端粒子,可调材料的生物学自组装特性以及生物系统生物系统的新兴机械设计原理,DARPA有兴趣探索微电油中未经预言的“未预言”生物结构的可行性。快速,控制的,方向的生长以创建非常大的(500米长)的有用空间结构将破坏当前的最新和位置生物学,作为空间组装基础架构的免费组成部分。一些可以在生物学上制造和组装的结构示例,但传统上可能是不可行的,包括用于太空电梯的tethers,用于轨道碎屑修复的网格网络,无线电科学的千里规模干涉仪,无线电科学的干涉仪,用于托管零件的新型自我组装机翼的新自动化翅膀进行促进的循环量造成材料的材料和贴材料和斑点的损坏。
BIO 121/122/123/124:常规生物学I和II
显微镜和测量 - 该单元回顾化合物的使用和解剖显微镜。学生研究各种标本,尤其是集中在苍蝇的翅膀上,这是复杂结构的一个例子。在本单元中还讨论了公制系统。访问大堡礁 - 该单位旨在给学生带来丰富,多样性和复杂性的学生。大障碍礁提供了许多主题的例子。引入了门那核,并将珊瑚和hydra用作说明性材料。自然的平衡将被解释,然后通过考虑thorns海星人口对礁石的冠冠的可能影响来证明。如何从生活的多样性中获得意义 - 在这个单位中,学生将学习以有意义的方式分类生物的尝试。强调到达物种的普遍适用定义的困难。介绍并证明了层次分类的原则。进化和过去的生活多样性 - 进化的某些主要方面,例如物种形成的自然选择和模式。过去生活的多样性是

鲻鱼科的表型变异和演化有限
亲本物种的变异(Rieseberg 等人,2003b;Bell 和 Travis,2005;Stelkens 等人,2009)。超亲表型在植物和动物中都很常见,迄今为止已在几种与适应度相关的性状中得到证实,包括形态学(鱼类的头骨形态学,Stelkens 等人,2009;蝴蝶的翅膀形态学,Mérot 等人,2020)、生理学(桡足类的温度耐受性,Pereira 等人,2014)、生活史(蜗牛的后代数量和大小,Facon 等人,2008)和行为性状(果蝇的交配行为,Ranganath 和 Aruna,2003;鱼类的觅食行为,Selz 和 Seehausen,2019;Feller 等人,2020)。已经提出了不同的机制来解释亲本基因组重组如何产生新性状(Rieseberg 等人,2003b;Bell 和 Travis,2005;Stelkens 等人,2009;Thompson 等人,2021)。极端杂交表型可能出现在第一代(F1)杂交中,这种现象通常
纹章 ~ 第 190 届 ARW 徽章
意义:金色骑士象征着战士的古老高贵和荣誉,金色代表着价值。骑士的姿态象征着部队响应国家召唤的热情和警觉。骑士头盔上的鸽子白色翅膀代表着部队为和平和保卫国家而飞行的能力。龙卷风描绘了部队在国家灾难和国家紧急状态时随时准备应对的决心和力量。红色双线代表我们对国家和国家的双重使命,重点突出,表明我们目标的单一性。蓝色龙卷风是空军的蓝色,暗示着天空,即空军作战的主要战场。头盔的黄色暗示着太阳和人员在分配任务中的卓越表现。红色是血的颜色,象征着生命和牺牲。浅蓝色代表着白天的消逝,联队仍然在保持稳定警惕的情况下运作。盾牌的白色边框不仅包裹了整个徽章,还表明了忠诚和完成部队使命的决心。卷轴上刻有部队的名称,代表了部队为国家服务的历史记录。

出版物清单-Ricardo Vinuesa
[80] S. Rezaeiravesh,R。Vinuesa和P. Schlatter。一个不确定性定量框架,用于评估计算流体动力学中的准确性,灵敏度和鲁棒性。J. Comput。SCI。 ,62,101688,2022。 [81] M. Morimoto,K。Fukami,R。Maulik,R。Vinuesa和K. Fukagata。 基于神经网络的流体流量估计中的模型形式的不存在定量。 Nagare J. JPN。 Soc。 流体机械。 ,41,2022。 [82] R. T. Javed,O。Nasir,M。Borit,L。Vanh´ee,E。Zea,S。Gupta,R。Vinuesa和J. Qadir。 下车! AI伦理教育中的孤岛:全球AI课程的无监督主题建模分析。 J. Artif。 Intell。 res。 ,73,933–965,2022。 [83] Moon,R。Murphy,Y。Nakauchi,E。Prestes,B。RaoR.,R。Vinuesa和C.-M。 m orch。 机器人技术在实现联合国可持续发展目标中的作用 - 专家在2021 IEEE/RSJ IROS研讨会上的会议。 IEEE机器人。 Autom。 mag。 ,29,92–107,2022。 [84] R. Vinuesa,O。Lehmkuhl,A。Lozano-Dur´an和J. Rabault。 翅膀中的流量控制和通过深度加强学习发现新方法。 流体,7,62,2022。 [85] R. Vinuesa和S. Le Clainche。 用于复杂流的机器学习方法。 Energies,15,1513,2022。 [86] N. Tabatabaei,R。Vinuesa,R。Orléu和P. Schlatter。SCI。,62,101688,2022。[81] M. Morimoto,K。Fukami,R。Maulik,R。Vinuesa和K. Fukagata。基于神经网络的流体流量估计中的模型形式的不存在定量。Nagare J. JPN。Soc。流体机械。,41,2022。[82] R. T. Javed,O。Nasir,M。Borit,L。Vanh´ee,E。Zea,S。Gupta,R。Vinuesa和J. Qadir。下车!AI伦理教育中的孤岛:全球AI课程的无监督主题建模分析。J. Artif。 Intell。 res。 ,73,933–965,2022。 [83] Moon,R。Murphy,Y。Nakauchi,E。Prestes,B。RaoR.,R。Vinuesa和C.-M。 m orch。 机器人技术在实现联合国可持续发展目标中的作用 - 专家在2021 IEEE/RSJ IROS研讨会上的会议。 IEEE机器人。 Autom。 mag。 ,29,92–107,2022。 [84] R. Vinuesa,O。Lehmkuhl,A。Lozano-Dur´an和J. Rabault。 翅膀中的流量控制和通过深度加强学习发现新方法。 流体,7,62,2022。 [85] R. Vinuesa和S. Le Clainche。 用于复杂流的机器学习方法。 Energies,15,1513,2022。 [86] N. Tabatabaei,R。Vinuesa,R。Orléu和P. Schlatter。J. Artif。Intell。 res。 ,73,933–965,2022。 [83] Moon,R。Murphy,Y。Nakauchi,E。Prestes,B。RaoR.,R。Vinuesa和C.-M。 m orch。 机器人技术在实现联合国可持续发展目标中的作用 - 专家在2021 IEEE/RSJ IROS研讨会上的会议。 IEEE机器人。 Autom。 mag。 ,29,92–107,2022。 [84] R. Vinuesa,O。Lehmkuhl,A。Lozano-Dur´an和J. Rabault。 翅膀中的流量控制和通过深度加强学习发现新方法。 流体,7,62,2022。 [85] R. Vinuesa和S. Le Clainche。 用于复杂流的机器学习方法。 Energies,15,1513,2022。 [86] N. Tabatabaei,R。Vinuesa,R。Orléu和P. Schlatter。Intell。res。,73,933–965,2022。[83]Moon,R。Murphy,Y。Nakauchi,E。Prestes,B。RaoR.,R。Vinuesa和C.-M。 m orch。 机器人技术在实现联合国可持续发展目标中的作用 - 专家在2021 IEEE/RSJ IROS研讨会上的会议。 IEEE机器人。 Autom。 mag。 ,29,92–107,2022。 [84] R. Vinuesa,O。Lehmkuhl,A。Lozano-Dur´an和J. Rabault。 翅膀中的流量控制和通过深度加强学习发现新方法。 流体,7,62,2022。 [85] R. Vinuesa和S. Le Clainche。 用于复杂流的机器学习方法。 Energies,15,1513,2022。 [86] N. Tabatabaei,R。Vinuesa,R。Orléu和P. Schlatter。Moon,R。Murphy,Y。Nakauchi,E。Prestes,B。RaoR.,R。Vinuesa和C.-M。 m orch。机器人技术在实现联合国可持续发展目标中的作用 - 专家在2021 IEEE/RSJ IROS研讨会上的会议。IEEE机器人。Autom。 mag。 ,29,92–107,2022。 [84] R. Vinuesa,O。Lehmkuhl,A。Lozano-Dur´an和J. Rabault。 翅膀中的流量控制和通过深度加强学习发现新方法。 流体,7,62,2022。 [85] R. Vinuesa和S. Le Clainche。 用于复杂流的机器学习方法。 Energies,15,1513,2022。 [86] N. Tabatabaei,R。Vinuesa,R。Orléu和P. Schlatter。Autom。mag。,29,92–107,2022。[84] R. Vinuesa,O。Lehmkuhl,A。Lozano-Dur´an和J. Rabault。翅膀中的流量控制和通过深度加强学习发现新方法。流体,7,62,2022。[85] R. Vinuesa和S. Le Clainche。用于复杂流的机器学习方法。Energies,15,1513,2022。[86] N. Tabatabaei,R。Vinuesa,R。Orléu和P. Schlatter。在rans模拟中,边界层的湍流跳闸技术。流湍流。燃烧。,108,661–682,2022。[87] N. Tabatabaei,M。Hajipour,F。Mallor,R。Orloul - Orl u,R。Vinuesa和P. Schlatter。使用风洞测量值对NACA4412唤醒建模。流体,7,153,2022。[88] G. R. McPherson,B。Sirmacek和R. Vinuesa。质量灭绝事件的环境阈值。结果工程。,13,100342,2022。[89] D. Mamchur,J。Peksa,S。LeClainche和R. Vinuesa。用于非侵入对象检查的射线照相和新技术的应用和进步。传感器,22,2121,2022。[90] R. Raman,P。Singh,V。K. Singh,R。Vinuesa和P. Nedungadi。了解IEEE访问中出版物的文献计量模式。IEEE访问,10,35561–35577,2022。[91] M. Atzori,W。Kéopp,S。W. D. Chien,D。Massaro,F。Mallor,A。Peplinski,M。Rezaei,N。Jansson,S。Markidis,R。Vinuesa,E。Laure,P。Schlatter,P。Schlatter和T. Weinkauf。用paraview催化剂在NEK5000中大规模湍流模拟的原位可视化。J.超级计算。,78,3605–3620,2022。[92] D. Mamchur,J。Peksa,S。LeClainche和R. Vinuesa。对非侵害对象筛查技术的艺术状态分析。prz。elektrotech。,98,168–173,2022。[93] S. Singh Gill,R。Vinuesa,V。Balasubramanian和S. K. Ghosh。创新的软件系统,用于管理COVID-19大流行的影响。nat。软件。:实践。实验。,52,821–823,2022。[94] R. Vinuesa和B. Sirmacek。可解释的深度学习模型,以帮助实现可持续发展目标。马赫。Intell。 ,3,926,2021。 [95] L. Guastoni,A。Guemes,A。Ianiro,S。Decetti,P。Schlatter,H。Azizpour和R. Vinuesa。 卷积网络模型,以预测壁数量的壁湍流。 J.流体机械。 ,928,A27,2021。 [96] A. Guemes,S。Decetti,A。Ianiro,B。Sirmacek,H。Azizpour和R. Vinuesa。 从粗壁测量到湍流速度场,通过深度学习。 物理。 流体,33,075121,2021。Intell。,3,926,2021。[95] L. Guastoni,A。Guemes,A。Ianiro,S。Decetti,P。Schlatter,H。Azizpour和R. Vinuesa。卷积网络模型,以预测壁数量的壁湍流。J.流体机械。,928,A27,2021。[96] A. Guemes,S。Decetti,A。Ianiro,B。Sirmacek,H。Azizpour和R. Vinuesa。从粗壁测量到湍流速度场,通过深度学习。物理。流体,33,075121,2021。
博士入学考试大纲 - 2024 年农业...
一、昆虫形态学 昆虫体壁结构、构造和形态;口器、触角及其类型和功能;翅膀:构造和形态、脉络、翅膀连接装置和飞行机制;足:构造和形态。 胚胎后发育。昆虫目中未成熟阶段的类型,卵、若虫/幼虫和蛹的形态,未成熟阶段对于害虫管理的意义。 二、昆虫解剖学和生理学 外皮生理学、蜕皮、角质层化学、几丁质的生物合成;生长、激素控制、变态和休眠期;信息素的分泌、传递、感知和接收。昆虫消化、循环、呼吸、排泄、繁殖、分泌(外分泌腺和内分泌腺)和神经冲动传递的生理学和机制。昆虫营养的重要性——维生素、蛋白质、氨基酸、碳水化合物、脂质、矿物质和其他食物成分的作用;细胞外和细胞内微生物及其在生理学中的作用;人工饲料。III. 昆虫分类学 昆虫目和其中所含的具有经济价值的科的区别性状、一般生物学、习性和栖息地。弹尾目、原尾目、双尾目。昆虫纲:无翅亚纲——古颌目、缨尾目。亚纲:有翅亚纲,古翅目——蜻蜓目和蜉蝣目。门:新翅目:亚门:直翅目和蜉蝣目(=小翅目:蜉蝣目、蜉蝣目、等翅目、螳螂目、蝼蛄目、革翅目、直翅目、竹节虫目、螳螂目、茧蜂目、蟠翅目),亚门:半翅目(=副翅目):伪翅目、虱目、缨翅目和半翅目。昆虫目及其所含重要经济科的鉴别特征、一般生物学、习性和栖息地(续)。新翅目亚门,脉翅目组-鞘翅目:捻翅目、大翅目、尖翅目、脉翅目和鞘翅目,全翅目组长翅目、蚤目、双翅目、毛翅目、鳞翅目,膜翅目组:膜翅目。IV. 昆虫生态学丰度的基本概念-模型与现实世界。种群增长基本模型-指数与逻辑模型。离散与连续增长模型。概念
北纬地区的蝙蝠
摘要 从全球来看,栖息地变化是生物多样性丧失的主要驱动因素之一。过去 150 年来,瑞典也发生了类似的变化,导致当地和景观尺度的栖息地复杂性丧失。与此同时,气候也在发生变化,过去 100 年来气温不断升高。这种气候变化可能会对栖息地及其微气候产生连锁反应。蝙蝠通常被认为是环境变化的良好指标。然而,许多蝙蝠物种在全球范围内正在减少,北欧种群被认为是受气候变化影响最大的。栖息地和气候变化对蝙蝠的影响范围很广,包括觅食栖息地的丧失、栖息地位置的影响、形态变化以及对昆虫猎物的影响。在这篇论文中,我确定了栖息地和气候如何在多个空间和时间尺度上影响瑞典的蝙蝠种群。由于这些驱动因素的复杂性,我们在瑞典的长纬度梯度上采用了多方法方法。为了研究蝙蝠形态变化的驱动因素,我分析了 180 年期间的博物馆标本以及历史地图、土地使用统计数据和温度数据。为了了解当地和景观尺度上的栖息地复杂性如何影响蝙蝠活动,我在一项以森林边界为重点的研究中监测了蝙蝠的声音、采集了猎物数量并测量了微气候。我还利用公民科学项目研究了蝙蝠的饮食以及栖息地选择的当地和景观驱动因素。我发现气候变化对蝙蝠形态没有影响,但两种蝙蝠的颌骨大小随时间而变化,一种蝙蝠的颌骨大小增加,另一种蝙蝠的颌骨大小减少。在微气候方面,湿度是蝙蝠活动的重要驱动因素。至于景观层面栖息地的影响,森林覆盖率影响了翅膀形态,在森林较多的景观中,蝙蝠的翅膀更短、更宽。此外,落叶林面积对蝙蝠活动、栖息地选择和蝙蝠猎物数量有积极影响。在当地规模上,森林结构复杂性对蝙蝠活动很重要,但对它们的昆虫猎物却不重要。我还发现两种最常见的物种(Eptesicus nilssonii 和 Pipistrellus pygmaeus)的饮食重叠性很高。这些发现强调了需要在当地和景观规模上保持和增加落叶林覆盖率以及异质栖息地内结构复杂的森林边界,以满足蝙蝠及其猎物的生态需求并确保它们未来的保护。

论文 昆虫飞行中的腹部运动重塑非气动结构对飞行机动性的作用 I:花朵追踪的模型预测控制
昆虫飞行控制研究主要集中在翅膀的作用上。然而,飞行过程中腹部的偏转可能会影响飞行动力学。本文评估了机身变形在飞行中的作用,并询问腹部对飞行机动性的贡献程度。为了解决这个问题,我们结合使用了模型预测控制 (MPC) 启发的计算惯性动力学模型和天蛾 Manduca sexta 的自由飞行实验。我们探索了欠驱动(即输出数量大于输入数量)和完全驱动(输出和输入数量相等)系统。使用无量纲跟踪误差和传输成本等指标来评估惯性动力学模型的飞行性能,我们表明完全驱动模拟可以最大限度地减少跟踪误差和传输成本。此外,我们通过在胸腹关节上固定碳纤维棒来测试限制腹部运动对活天蛾自由飞行的影响。腹部受限的飞蛾表现比假治疗飞蛾差。这项研究发现腹部运动有助于飞行控制和机动性。这种非气动结构运动存在于所有飞行类群中,可以为多驱动微型飞行器的开发提供参考。