XiaoMi-AI文件搜索系统
World File Search System背车
硝苯地平阻断注射至背缝核的三唑仑对睡眠的影响
第 1 小时平均值 40.32 ± 1.51 40.06 ± 1.28 40.35 ± 1.30 40.41 ± 1.55 40.27 ± 1.33 40.15 ± 1.28 NS 第 6 小时平均值 40.78 ± 1.61 40.49 ± 1.34 40.30 ± 1.26 40.78 ± 1.64 40.35 ± 1.14 40.53 ± 1.33 NS 第 1 小时平均值 - 0.66 ± 0.08 0.75 ± 1.56 0.81 ± 0.25 1.23 ± 0.51 0.82 ± 0.15 0.54 ± 0.22 NS 基线睡眠开始时间 40.60 ± 1.08 40.07 ± 1.43 40.32 ± 1.33 40.29 ± 1.52 40.23 ± 1.33 40.06 ± 1.30 NS 最高温度 41.50 ± 1.63 41.25 ± 1.36 41.49 ± 1.46 41.66 ± 1.68 41.23 ± 1.32 41.46 ± 1.48 NS 6小时内注射时间 170.8 ± 35.1 204.1 ± 38.5 198.7 ± 42.9 171.8 ± 30.3 178.6 ± 33.6 181.1 ± 23.0 NS 至最高温时间(分钟) 环境温度 26.4 ± 0.16 26.7±0.14 26.5±0.16 26.5±0.16 26.5±0.15 26.4±0.15 正常

1 2 3 1 高知 (06) 高空作业车作业等 高知驻军 ...
6 一般事项 (1) 承包商应提供所使用的高空作业平台。 (2)高空作业车的操作应由承包商进行。 (3)承包商应负责将货物运至使用现场和运离使用现场。 (4)承包商应承担工作期间和装卸时使用的燃料费用。 (5)在开展工作前,必须向主管部门提交高空作业平台操作人员的驾驶执照副本。

2023 年取车时间表 Aukamm 住房
26 星期四 26 星期日 26 星期日 26 星期三 26 星期五 2 26 星期一 26 星期三 26 星期六 26 星期二 26 星期四 26 星期日 26 星期二 圣诞节

具有漫游地形的漫游车导航的经验
引言月球的诱惑很强 - 人类再次应对挑战。一个有前途的近期场景是将一对流浪者降落在月球上,并参与多年1000公里的历史景点,包括阿波罗11号,测量师5,游侠8,阿波罗17和Lunokhod 2 [6]。在这种情况下,流浪者将以自主或保护的监督控制模式进行操作,并将其周围环境的连续实时视频传输到地球上的操作员。虽然这种任务的硬件方面令人生畏 - 电源,热,通信,机械和电气可靠性等。- 软件控制方面同样具有挑战性。特别是,流动站需要能够在各种地形上行驶并维护其操作的能力。以前的行星机器人(尤其是Lunokhod 2和Viking的手臂)的经验说明了远程操作员的费力和不可预测的时间延迟的漫画。更好的操作模式是监督远程运行,甚至是自动操作,其中流动站本身负责做出许多维持进度和安全所需的决定。我们已经开始了一项计划,以开发和演示技术,以在月球般的环境中启用远程,保护的远程操作和自动驾驶。特别是,我们正在研究立体声的技术

使用无人空中突击车(UAAV)作为不对称因素
摘要-在21世纪,无人系统(尤其是无人机)将在作战领域发挥主导作用。由于许多领域的技术发展,将无人机用于军事目的变得越来越容易。回顾过去25年来进行的行动,可以看出大多数行动都是在居民区进行的,在那里,具有不对称效果的技术、战术和装备将产生重大影响。除此之外,行动中人员伤亡越多,政府受到的公众压力就越大。考虑到这些因素,人们认为,无人机可用于增加作战优势并防止人员伤亡,未来将得到更频繁、更有效的使用。人们还认为,无人机将在居民区和其他作战环境中用作突击媒介,以利用高水平的不对称效应。
将IC发动机改造为两轮车中的EV
电子和电信工程部,AISSMS的理工学院,浦那,马哈拉施特拉邦,印度摘要:本文使用单个超声波传感器,Arduino板和带有驱动程序模块的5V步进电机的单个超声波传感器,Arduino板和5V步进电动机的设计和实现。该项目的目的是创建一个能够在整个360度范围内扫描环境的低成本,有效的类似系统。安装在步进电机上的超声波传感器允许在多个角度位置进行距离测量,从而提供周围区域的全面空间映射。Arduino董事会充当中央控制器,处理传感器数据采集,电机控制和实时数据处理。5V步进电动机与驱动器模块结合使用,可实现精确的旋转运动以进行准确的扫描,同时确保平稳可靠的操作。在各种应用程序中都证明了系统的功能,例如障碍物检测,环境映射和基本自主导航。本文还讨论了系统集成过程中遇到的挑战,包括实现准确的电机控制,传感器校准以及为实时数据可视化管理处理速度。结果表明,该雷达系统由负担得起的组件提供动力,是用于在机器人技术,监视和教育项目中应用的有效解决方案。

从铁窗到造车 - 沃什特瑙之声
当生活变得艰难时,只要你留心并且不急于放弃,生活就会在你需要的时候给你所需要的东西。沃什特瑙社区学院定制汽车和概念项目的实验室技术员埃里克·吉斯克拉 (Eric Jiskra) 有一个故事可以证明这一点。“过去几年,我生活中发生的一系列事情真的很奇怪,”34 岁的伊普斯兰蒂人吉斯克拉说道。“四年前我开始了这个项目,但在此之前的四年,我戴着肚镣铐在去监狱的路上。”吉斯克拉在因与酒精有关的罪行入狱前从事建筑工作。在监禁期间,他花时间学习如何锻炼。获释后,他来到沃什特瑙社区学院并报名参加护理项目,以便学习物理治疗。“对我来说,出狱后最重要的事情是,我希望找到一种方式来回报公众,因为我是一个败类,”吉斯克拉说道。 “就社会而言,我已经付出了代价,服刑完毕,然后就离开了。从意识层面上看,就因果报应而言,我还没有得到解脱。我以为物理治疗会很好。”
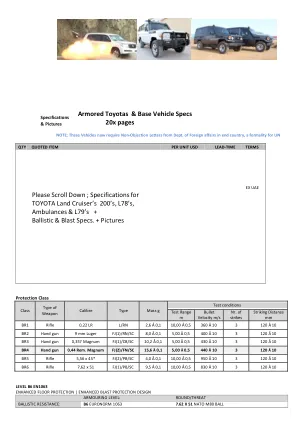
装甲丰田车和基础车辆规格 20x 页
保修 AW 保证装甲过程中使用的材料和工艺在 12 个月或 50,000 公里(以先到者为准)内不会出现缺陷。由于车辆经过大量定制,一般 OEM 保修不再适用。UW 提供 12 个月或 20,000 公里(以先到者为准)保修,但不包括车主滥用。对于喀布尔或巴格达以外的地区,仅提供零件保修。保修仅涵盖非摩擦部件的维修和正常使用情况。如果车辆未在 1000、2500、5000 公里和每 5000 公里在认可的服务中心进行维修(伊拉克建议的服务间隔为每 2500 公里),则保修无效。其他条件适用。燃油质量相关问题不在保修范围内。我们强烈建议安装机油和柴油清洁系统,以最大限度地减少燃油相关问题。

背衬压电微机械超声换能器(B-PMUT)二维阵列的开发
[1] MILLER DL, SMITH NB, BAILEY MR 等。治疗性超声应用和安全注意事项概述[J]。超声医学杂志,2012,31 (4): 623-634。[2] WANG J, ZHENG Z, CHAN J 等。用于血管内超声成像的电容式微机械超声换能器[J]。微系统纳米工程,2020,6 (1): 73。[3] JIANG X, TANG HY, LU Y 等。基于与 CMOS 电路键合的 PMUT 阵列的发射波束成形超声指纹传感器[J]。IEEE 超声铁电频率控制学报,2017,PP (9): 1-1。[4] CHEN X, XU J, CHEN H 等。利用多频连续波的 pMUT 阵列实现高精度超声测距仪[J]。微机电系统,2019 年。[5] CABRERA-MUNOZ NE、ELIAHOO P、WODNICKI R 等人。微型 15 MHz 侧视相控阵换能器导管的制造和特性[J]。IEEE 超声铁电和频率控制学报,2019 年:1-1。[6] LU Y、HEIDARI A、SHELTON S 等人。用于血管内超声成像的高频压电微机械超声换能器阵列[S]。IEEE 微机电系统国际会议;2014 年。[7] ZAMORA I、LEDESMA E、URANGA A 等人。用于成像应用的具有 +17 dB SNR 的单片 PMUT-on-CMOS 超声系统[J]。 IEEE Access,2020,页(99):1-1。[8] JUNG J,LEE W,KANG W 等。压电微机械超声换能器及其应用综述[J]。微机械与微工程杂志,2017,27 (11):113001。[9] BERG S,RONNEKLEIV A。5F-5通过引入有损顶层降低CMUT阵列中膜之间的流体耦合串扰[S]。超声波研讨会;2012年。[10] LARSON J D。相控阵换能器中的非理想辐射器[S]。IEEE;1981年。[11] NISTORICA C、LATEV D、SANO T 等。宽带宽、高灵敏度的高频压电微机械换能器[S]。 2019 IEEE 国际超声波研讨会(IUS);2019: 1088-1091。[12] 何丽梅,徐文江,刘文江等。基于三维有限元仿真的二维阵列压电微机械超声换能器性能和串扰评估[S]。2019 IEEE 国际超声波研讨会(IUS);2019。[13] PIROUZ A、MAGRUDER R、HARVEY G 等。基于 FEA 和云 HPC 的大型 PMUT 阵列串扰研究[S]。2019 IEEE 国际超声波研讨会(IUS);2019。[14] DZIEWIERZ J、RAMADAS SN、GACHAGAN A 等。一种用于NDE应用的包含六边形元件和三角形切割压电复合材料子结构的2D超声波阵列设计[S]。超声波研讨会;2009年。[15]徐婷,赵玲,姜哲,等。低串扰、高阻抗的压电微机械超声换能器阵列设计
EUDIS、HEDI、DIANA:三个国防创新缩写背后有什么含义?
冷战期间,欧洲北约盟国的国防支出平均占国内生产总值的 3% 以上,且随时间变化。冷战结束后,西方国家不仅大幅削减国防开支,还将军事研发削减 25% 或更多。从 2005 年到 2017 年,欧洲研发支出占国防总支出的比例从 5% 降至 3.5%。根据欧洲防务局的数据,2022 年,欧盟 (EU) 国防总支出为 2400 亿欧元,其中研发支出增加到 3.9%,即 95 亿欧元。然而,尽管最近国防总支出和国防研发支出都有所增加,但国防研发投资并未获得应有的收益。 2022 年,欧盟成员国在国防研发上花费了 35 亿欧元,占其国防总开支的 1.5%,高于 2011 年的 1.1%,但比 2021 年下降了 0.2%。这远低于 2017 年启动的欧盟安全与防务领域永久性结构性合作 (PESCo) 框架中设定的目标,即至少将国防总开支的 2% 投资于研究和技术。目前只有两个欧盟成员国实现了 2% 的目标,该目标于 2007 年 11 月在 EDA 部长级指导委员会上首次达成。以法国为首,这两个国家占欧盟国防研发总开支的 80% 以上。