XiaoMi-AI文件搜索系统
World File Search System能见度

LFRK - 卡昂卡尔皮凯 - dircam
可用设施和设备 22.3.1 RWY 31 配备: 跑道 31 配备: - - 仅 ILS CAT 1, - - 由单向白灯组成的 420 米 HI 进近坡道。一条长 420 米、由单向白灯组成的进场坡道 LIH。 RWY 13 未配备 ILS 或进近坡道。 13 号跑道未配备 ILS 或进近坡道。车道 22.3.2 交通车道 22.3.2 在低速车道 (LVP) 条件下: 在低速车道 (LVP) 下: - 可用的车道:A1。 - 可用车道:A1。可用的握持点:A1。 - 可用跑道前的等待点:A1。通讯 22.3.3 通讯 22.3.3 当 LVP 程序生效时,飞行员会通过 ATIS 收到通知。当 LVP 程序生效时,ATIS 会通知飞行员。 LVP 实施和结束标准 22.3.4 当能见度在 550 米至 400 米之间或云层 < 200 英尺时,LVP 有效。当能见度在 550 米至 400 米之间或云层高度小于 200 英尺时,LVP 有效。 LVP 持续有效,直到标准(RVR 和云层高度)被大幅超越。 LVP 持续有效,直到触发 LVP 的标准(RVR 和云层高度)被大幅超越为止。 - 抵达时无 LVP。 - 抵达时无 LVP。 - 在机动区域内,流通范围仅限于单个移动设备。 - 整个机动区域内仅限一辆车通行。照明 22.3.5 标志 22.3.5 RWY 标志:白天地面标志 - 跑道和转弯区域的边缘照明 - THR LIH。跑道标记:通过标记(白天) - 跑道上的侧灯和折返灯 - HI 中的阈值。其他照明:等待点 A1 的 RWY 保护灯 (Wig-Wag) - 义务面板 - TWY A1 边缘照明。其他照明:A1 跑道前等待点的跑道保护灯 (Wig-Wag) - 强制性标志 - TWY A1 侧灯。
事故或机动损坏的索赔程序
不要承认对事故负责,也不要向财产受损的人支付现金。机动损坏(对农作物、地形等造成的损坏) ___ 1. 填写并保留 AE 表格 350-22A(第 2 页),以便通过您的单位索赔官 (UCO) 进行处理。 ___ 2. 尽可能多地获取证据。使用数码相机、智能手机和卷尺显示车辆或财产的损坏情况。 ___ 3. 尽可能多地写下发生的事情,包括道路状况、天气和能见度以及可能导致事故的异常情况(例如:道路上的鹿)。 ___ 4. 尽快通过电子邮件 usarmy.wiesbaden.usareur.mesg.oja-european-torts@army.mil 或电话 INT.# 49(0)611-143-537-0649/0648 通知你的指挥系统和美国陆军欧洲索赔服务处事故情况。 . 车辆事故 ___ 1. 发生事故时,确保驾驶员和所有乘客都安全且没有受伤。 ___ 2. 尽最大努力保护事故区域,使用橙色安全交通三角形(如有)封锁现场。 ___ 3. 必要时提供急救。 ___ 4. 留在现场,直到当地政府或你的指挥系统释放你。 ___ 5. 填写此包中正确的国家页面。将标有“美国人员填写并提供给潜在索赔人”的页面交给涉案的另一位司机/个人。如果可能,请在将此文件交给另一位司机/个人之前拍照或复印一份。标有“美国人员填写并转交给单位索赔官”的页面应填写完毕并交给单位索赔官 (UCO) 或负责指挥官。___ 6. 填写并保留 AE 表格 350-22A(第 2 页),以便通过您的 UCO 进行处理。___ 7. 尽可能多地获取证据。使用数码相机、智能手机和卷尺显示车辆或财产的损坏情况。___ 8. 尽可能多地写下发生的事情的事实,包括道路状况、天气和能见度以及可能导致事故的异常情况(例如:道路上的鹿)。 ___ 9. 尽快通过电子邮件将事故情况通知你的指挥系统和美国陆军欧洲索赔服务处:usarmy.wiesbaden.usareur.mesg.oja-european-torts@army.mil 或致电国际电话# 49(0)611-143-537-0649/0648。
![初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、](/simg/4\4b79ebb2e692147077c5f05290fe6b1288b2aad1.png)
初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、
初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、
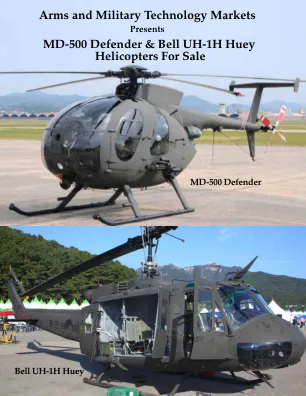
MD-500 Defender 和 Bell UH-1H Huey 直升机出售
触摸屏飞行显示器 明亮、清晰的 10.6 英寸和 7 英寸 LCD 触摸屏显示器为直升机提供了多种经济实惠、节省空间的玻璃驾驶舱解决方案。可选的 Garmin HSVT™ 3-D 合成视觉可帮助您在黑暗的夜间 VFR 条件、能见度降低的环境 (DVE) 或无意的 IMC 中清晰地看到自己的方向。使用我们的可选直升机地形感知和警告系统¹(HTAWS) 避开障碍物,该系统具有五色显示阴影和可听见的语音呼叫警报,可增强地形感知能力 与我们的 GFC™ 600H 飞行控制系统接口,并提供与我们的 GTN™ 650/750¹ 系列导航仪的全触摸屏系统连续性。提供可选的夜视镜 (NVG) 兼容性和用于尾部凸轮、FLIR 或 MFD 上其他可选摄像头显示的多个输入。
附录 F——公共道路上的军事行动
长 2 英寸宽的水平条带,长 12 英寸宽,使用红色反光漆、胶带或其他反光材料贴在车辆后下角,图 F-3。如果使用油漆,可以直接涂在车辆表面或可拆卸背衬材料的表面。小型车辆或牵引设备后部的条带长度和位置可能取决于可用的平面或车辆的能见度特性。有关具体标记说明,请参阅 49 CFR 第 571.108 部分,标准编号 108;灯、反光装置和相关设备。车队 CDR 将遵守州或地方当局要求的所有预防措施。部署期间穿越道路的车辆必须符合所有安全标准。根据部署命令,运输而非驾驶的车辆可能会去除反光标记。
海上无人系统 (MUS)
在 2018 年布鲁塞尔峰会上,北约领导人重申了海洋领域的战略重要性以及投资新无人能力的重要性。随后,13 个盟国国防部长于 2018 年 10 月启动了 MUS 多国高能见度项目 3。2019 年 4 月,在两年一次的国家军备总监会议上,法国成为第 14 个参与者。2020 年 11 月,该计划迎来了 3 个新参与者——澳大利亚、加拿大和罗马尼亚——突显了 MUS 的全球影响力。MUS 计划的第一个成果是第一届年度作战演习“公认环境图、海上无人系统”(REP(MUS)19),由葡萄牙主办,有数十艘无人水下、水面和空中航行器参加。其重点是将无人系统整合到海军行动中。
附录 F——公共道路上的军事行动
长 2 英寸宽的水平条带,长 12 英寸宽,使用红色反光漆、胶带或其他反光材料贴在车辆后下角,图 F-3。如果使用油漆,可以直接涂在车辆表面或可拆卸背衬材料的表面。小型车辆或牵引设备后部的条带长度和位置可能取决于可用的平面或车辆的能见度特性。有关具体标记说明,请参阅 49 CFR 第 571.108 部分,标准编号 108;灯、反光装置和相关设备。车队 CDR 将遵守州或地方当局要求的所有预防措施。部署期间穿越道路的车辆必须符合所有安全标准。根据部署命令,运输而非驾驶的车辆可能会去除反光标记。

唐纳德·J·特朗普政府,2021 年太空政策...
公里,已成为航天发射操作不可或缺的组成部分。尽管视线能见度降低且接收信号功率较低,GPS 的使用仍在扩展到太空服务区 (SSV),该区从 3,000 公里延伸到地球同步轨道 (GEO)。卫星依靠 GPS 进行导航、姿态控制、空间态势感知和新的空间科学应用,例如无线电掩星。根据 2017 年 12 月 11 日的空间政策指令 1 (SPD-1)(重振美国载人太空探索计划)和 2018 年 6 月 18 日的空间政策指令 3 (SPD-3)(国家空间交通管理政策),PNT 服务也将在空间交通管理和地月服务区的未来应用中发挥重要作用,该区从 GEO 延伸到月球轨道。对于支持这些新兴应用所需的要求,各机构应通过标准 GPS 要求流程进行协调。

道路环境如何影响驾驶员的工作负荷?
本文重点研究了驾驶员在乡村双车道公路上行驶时的工作负荷,这些公路的交通流量各不相同。研究的目的是研究一个可以代表驾驶努力的参数,该参数对干扰正常驾驶活动的外部因素非常敏感。为了解决这个问题,作者使用了一种特殊的仪器车辆来监测驾驶员的一些生理参数(如眼球运动和皮肤电化学电阻),并将其值与道路环境联系起来。结果非常有趣,并证实了只有当工作负荷与外部环境以及道路几何形状、交通、能见度等相关时,了解工作负荷才有助于提高道路安全。只有这样,道路管理人员才能推断出适当的信息,以规划和指导准确、高效的升级工作操作。© 2017 作者。由 Elsevier Ltd. 出版。同行评审由第 10 届国际科学会议 Transbaltica 2017:交通科学与技术组委会负责。
章节目录 - WMO 图书馆
例行观测应在航空气象站进行,观测时间和频率由成员国根据国内和国际空中航行的需要确定,同时充分考虑区域空中航行安排。特殊观测和其他非常规观测应以同样的方式进行。机场的例行观测应在每天的全天或部分时间内,每小时或每半小时进行一次,或根据飞机运行需要进行。当地面风、能见度、RVR、当前天气和/或云的例行观测之间发生特定变化时,必须进行特殊观测。这些特定变化在《技术规则》第 II 卷第 II 部分附录 3,2.3.2 中列出。这些观测结果以 METAR 或 SPECI 类型的编码报告形式在航空气象站之间进行国际交换。其他类型的报告仅适用于航空运营,应按照气象和机场当局共同确定的形式准备。