XiaoMi-AI文件搜索系统
World File Search System自主

自主计算 - CiteSeerX
IBM 于 2001 年启动了自主计算计划,旨在构建自我管理的计算系统,以克服快速增长的复杂性问题。四年后,IBM 取得了重大成功,例如 DB2 Configuration Advisor [Kwan 03] 或 Tivoli Risk Manager [IBM 05b]。到 2005 年 4 月,IBM 已将 475 多个自主功能融入到 75 多个产品中 [IBM 05a]。此外,IBM 在团结研究界支持其自主计算计划方面取得了巨大成功 [IBM 02]。出现了几个会议和研讨会,包括电气和电子工程师协会 (IEEE) 自主计算国际会议 (ICAC);计算机协会 (ACM) 自我管理系统研讨会 (WOSS);ACM 自主系统设计和演化研讨会 (DEAS);自主计算研讨会 (AMS);自主计算系统对人类的影响和应用会议(CHIACS);自主应用研讨会(AAW);自主系统工程(EAS)研讨会;以及可靠系统软件架构研讨会(WADS)。

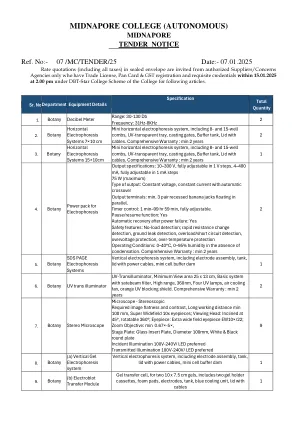
Midnapore College(自主)
Name : Dual-Input pH/ORP/ISE/Temperature Bench Meter with Calibration Check , pH Range : -2.0 to 20.0 pH / -2.00 to 20.00 pH / -2.000 to 20.000 pH, pH Resolution :0.1 pH / 0.01 pH / 0.001 pH, pH Accuracy: ±0.1 pH / ±0.01 pH / ±0.001 pH, pH Calibration: Up to 5 points / 7 standard buffers (1.68, 4.01、6.86、7.01、9.18、10.01、12.45) / 5自定义缓冲区,ORP范围:±2000.0 mV,ORP分辨率:0.1 mV,ORP准确性:±0.2 mV,ISE范围:1.00 E-7至9.99 E10 CONTOLUTION:3 e10 E10 CONTOLUTION:3位数:3 digity:3 digity 0.01,0.1,10%,10%,10%,10%,10%,10%,10%,10%,10%,10%,10%,10%,10%,10%,10%,10%,10%,10%,1.1,10%,10%,1.1,10%,1.1,10%,1.1,10%,10%,10%,10%,10%,10%,10%。 (单价离子)/±1%的读数(二价离子),ISE校准:最高5分:6标准(0.1、1、10、100、1000、10000 ppm),:(二价离子),温度范围:–20.0至120.0°C温度:0.1°C(0.1°C(0.1°C),0.2°C精确:cecceccceccecceccecceccecceccecceccecceccecceccecceccecceccec,cocce很多:0.1°C ceccecceccecceccecccepr增加。 °F)REL MV偏移范围:±2000 mV,温度补偿:手动和自动,电极:pH / ORP / ISE电极,温度探针:RCA连接,按需记录:MIN200样品< / div>

道德与自主武器系统
伦理与自主武器系统:人类控制的伦理基础? 红十字国际委员会,日内瓦,2018 年 4 月 3 日 执行摘要 红十字国际委员会认为,必须保持对武器系统和武力使用的人类控制,以确保遵守国际法并满足伦理顾虑,各国必须紧急努力为武器系统的自主性设定限制。 2017 年 8 月,红十字国际委员会召集独立专家举行圆桌会议,探讨自主武器系统引发的伦理问题以及人类控制要求的伦理层面。本报告总结了讨论内容并强调了红十字国际委员会的主要结论。 根本的伦理问题是,人道原则和公众良知的要求是否能够让人类对使用武力的决策被计算机控制的流程有效取代,将生死攸关的决定交给机器。显然,国家和整个社会的道德决策先于并推动了战争中新的国际法律约束的发展,包括对造成不可接受伤害的武器的限制。在国际人道主义法中,人性和公众良知的概念源自马尔顿条款。作为公众良知的潜在标志,迄今为止的民意调查显示,人们普遍反对自主武器系统
