XiaoMi-AI文件搜索系统
World File Search System艺术
调节艺术的艺术
1DRPL &DKQ LV WKH -XVWLFH $QWKRQ\ 0 .HQQHG\ 'LVWLQJXLVKHG 3URIHVVRU RI /DZ 1DQF\ / %XF ¶ 5HVHDUFK 3URIHVVRU LQ 'HPRFUDF\ DQG (TXLW\ DQG &R 'LUHFWRU )DPLO\ /DZ &HQWHU DW WKH 8QLYHUVLW\ RI 9LUJLQLD 6FKRRO RI /DZ 6RQLD 0 6XWHU LV 7KH .DKDQ )DPLO\ 5HVHDUFK 3URIHVVRU RI /DZ )RXQGLQJ 'LUHFWRU +HDOWK /DZ ,QLWLDWLYH 7KH *HRUJH :DVKLQJWRQ 8QLYHUVLW\ /DZ 6FKRRO :H WKDQN %DUEDUD 3IHIIHU %LOODXHU DQG WKH &KLFDJR .HQW /DZ 5HYLHZ IRU RUJDQL]LQJ VXFK DQ DPD]LQJ FRQIHUHQFH 7KDQNV DOVR WR 3URIHVVRU %LOODXHU DQG WKH FRQIHUHQFH SDUWLFLSDQWV DQG WR +DQN *UHHO\ DQG WKH SDUWLFLSDQWV RI WKH 6WDQIRUG /DZ DQG %LRVFLHQFHV :RUNVKRS IRU WKHLU FRPPHQWV RQ DQ HDUOLHU GUDIW )LQDOO\ WKDQNV WR 0DU\ .DWH +XQWHU *HUPDLQH /HDK\ $OH[DQGUD 0DUVKDOO +HDWKHU 6NUDEDN DQG 6RSKLH /HII IRU WKHLU H[FHOOHQW UHVHDUFK DVVLVWDQFH

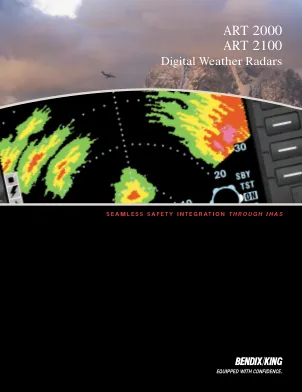
艺术 2000 艺术 2100
ART 2000 和 ART 2100 使用的直观颜色生动地描绘了天气状况,让您轻松避开危险的天气系统。使用灵敏度时间逻辑,系统将目标距离与强度关联起来,其衰减补偿可减少阴影。四种鲜艳的颜色(绿色、黄色、红色、洋红色)描绘天气强度。

艺术
ARTS GRADE 9 GRADE 10 GRADE 11 GRADE 12 Drama ADA1O ADA2O ADA3M/ADA3O ADA4M/ADA4E Drama – Play writing ADP3M ADP4M Drama- Musical Theatre ADB3M ADB4M Music - (INSTRUMENTAL) AMU1O AMU2O AMU3M AMU4M Music – Guitar AMG2O AMG3O Music- Jazz (Audition required) AMH2O AMH3O AMH4M Music – Vocal/Choral AMV1O AMV2O AMV3M AMV4M Visual Arts AVI1O AVI2O AVI3M AVI4M Visual Arts – Ceramics AWC2O AWC3M AWC4M Visual Arts – Animation AWR3M AWR4M Visual Arts – Media Arts ASM2O ASM3M ASM4M Visual Arts – History of Cinema ADV3M (Hollywood) ADV4M (国际)视觉艺术 - 应用设计AWP3M(雕塑)AWD4M(投资组合)加拿大和世界研究9年级10年级10年级11年级11年级12年级12年级 - 加拿大地理CGC1D或CGC1P加拿大的历史以来1次世界大战以来的历史

纺织艺术和图形艺术如何相互作用?
首先,在图形作品中,材料或纺织技术的价值中的所有价值,因为我们可以看到他们的弊端,可以说Sarbacane在2023年在2023年编辑的BéaLema(场景和图纸)[A] [A],Vera,在父亲的陪同下,他的母亲Adela向海滩陪同,渴望在水中结束它。遵循一份医学报告的摘录,该报告突出了阿德拉(Adela)的心理健康状况。然后,维拉记得她的出生,童年和陷入母亲地狱的下降……贝拉·莱玛(BéaLema)所说的邪恶的工作,将场景和图纸相关联,探索了图形工作中物质或纺织技术的使用。在这种特定情况下,使用纺织品的特殊性可以基于几个元素。通过将纺织品元素集成到他的图纸中,BéaLema可以为他的作品增添触觉维度。织物,电线或其他纺织品材料可以为他的图纸提供纹理,浮雕或明显的感觉,为读者提供更丰富的感官体验。即使扫描了刺绣,它也会在其内存中调用,并回忆着刺绣周围的整个宇宙。也有一种象征主义和视觉隐喻形式。纺织品可以具有符号或隐喻含义。可以使用特定的纺织品材料或技术(例如刺绣,编织或缝纫)的使用,以象征性的方式使用,以增强或说明工作中解决的主题或情感。例如,织物的脆弱性可以象征字符或情况的脆弱性。艺术家可以创建视觉上丰富而复杂的作品,从而为作品的美学增加了一个额外的维度。混合技术的集成,例如绘制刺绣,使艺术家可以推动绘画的传统限制,并探索创建令人回味和表现力的图像的新方法。简而言之,贝亚·莱玛(BéaLema)图形工作中材料或纺织技术的整合提供了探索传统图纸与纺织品的切实元素之间融合的可能性。这也可以构建一个故事,在过去与现在的现实和虚构之间进行回程,这要归功于刺绣,这使得传递记忆是可能的。这通过为插图提供了其他维度,同时增强了历史上解决的主题和情感,从而丰富了读者的美学和感官体验。

人工智能艺术中的艺术自主性
引言 对创造力和意图的伦理关怀 自动化在社会中的传统作用是通过外包日常任务来让人类生活更轻松,并且按照传统,它取代人类的工作以降低成本、增加利润。例如,推荐系统利用语言模型来吸引用户参与预测文本系统。然而,由于它改变了人们的写作方式,这种媒介受到了许多批评。研究发现,这些系统让人变得“像机器一样”——从其意图就可以看出这一点(Varshney 2020b)。这促使人们在实施自动化时要伦理关怀人类的属性——其中之一就是创造力。事实上,早在 1964 年,技术学者刘易斯·芒福德 (Lewis Mumford) 就引用了歌德的《魔法师的学徒》来论述:“首先,让我质疑这样一种观点,即自动化在任何意义上都是最终的利益,它在各个方面都如此有益,因此必须加快这一进程并坚持不懈地扩展到每个领域……”如果人类有机体仅按照这一原则发展,……人类将失去思维能力”(Mumford 1964)。在精神分析中,创造力是驱动艺术体验的表达要素或自然人类冲动(Zweig 2012)。它让观众感到惊讶,因为它突破了被认为是现实体验的界限。令人惊讶的是,它推动了创造力的产生,这一点可以通过好奇机器人的人工智能创造系统将其用作创造性行动的内在动机来检验(Saunders et al. 2010)。人工智能艺术,