XiaoMi-AI文件搜索系统
World File Search System螺旋桨

螺旋桨和机翼螺旋桨推力矢量 - eCommons
摘要 本研究调查了安装在螺旋桨尾流中的基于叶片的推力矢量系统的效率,该系统在净推力损失最小的情况下支持前向力。矢量系统本身既可以放置在独立螺旋桨配置中,也可以放置在机翼内螺旋桨配置中。代顿大学低速风洞 (UD-LSWT) 使用现成的 R/C 螺旋桨进行静态和基于风力的实验。灵敏度分析确定了叶片偏转角对推力矢量的影响以及螺旋桨相对于集成机翼上表面的位置对系统性能的影响。静态测试结果表明,当矢量设计放置在机翼中时,叶片性能显着改善。实现了推力矢量控制,随后俯仰力矩发生变化,在两种螺旋桨俯仰情况下,叶片偏转角逐渐增加:75° 和 90°。标准 90° 俯仰方向的集成式机翼螺旋桨系统的风洞试验结果显示,在前进比低于 0.3 时,推力矢量控制成功,这对于大多数相关应用而言都是实用的;螺旋桨叶片系统的 75° 俯仰方向观察到推力矢量控制能力扩展到 0.7 的前进比。敏感性分析表明,暴露在流动自由流中的螺旋桨的整体效率高于完全嵌入模拟机翼的螺旋桨,尽管嵌入式情况具有更好的推力矢量控制能力。致谢 衷心感谢亨利·卢斯基金会通过克莱尔·布思·卢斯 (CBL) 研究计划提供的支持。另一位重要的捐助者蔡杰龙先生(Jacky)对本作品在整个过程中给予的持续指导深表感谢。
螺旋桨和机翼螺旋桨推力矢量 - eCommons
摘要 本研究调查了位于螺旋桨尾流中的基于叶片的推力矢量系统的效率,该系统可在净推力损失最小的情况下支持前向力。矢量系统本身既可放置在独立螺旋桨配置中,也可放置在机翼螺旋桨配置中。在代顿大学低速风洞 (UD-LSWT) 使用现成的 R/C 螺旋桨进行静态和基于风力的实验。敏感性分析确定了叶片偏转角对推力矢量的影响以及螺旋桨相对于集成机翼上表面的位置对系统性能的影响。静态测试结果表明,当矢量设计放置在机翼中时,叶片性能显著改善。在两种螺旋桨俯仰情况下:75° 和 90°,随着叶片偏转角的逐渐增加,实现了推力矢量,随之改变了俯仰力矩。标准 90° 螺距方向的一体式机翼螺旋桨系统风洞试验结果显示,在低于 0.3 的前进比下成功实现推力矢量控制,这对于大多数相关应用而言是实用的;螺旋桨叶片系统的 75° 螺距方向观察到推力矢量控制能力扩展到 0.7 的前进比。敏感性分析表明,暴露在流动自由流中的螺旋桨的整体效率高于完全嵌入模拟机翼的螺旋桨,尽管嵌入式壳体具有更好的推力矢量控制能力。致谢 诚挚感谢亨利·卢斯基金会通过克莱尔·布思·卢斯 (CBL) 研究项目提供的支持。另一位主要捐助者蔡杰龙先生(Jacky)对本工作期间的持续指导深表感谢。

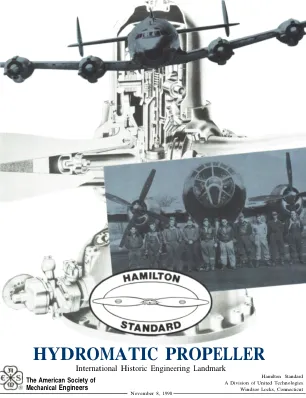
液压螺旋桨 - ASME
Hamilton Standard Hydromatic 螺旋桨代表了螺旋桨设计的重大进步,为未来 50 年推进技术的进一步发展奠定了基础。Hydromatic 的设计旨在容纳更大的叶片以增加推力,并提供更快的螺距变化率和更广泛的螺距控制范围。这种螺旋桨利用施加在驱动活塞两侧的高压油进行螺距控制和顺桨(停止不工作发动机上的螺旋桨旋转以减少阻力和振动的动作),使多引擎飞机能够安全地继续使用剩余的发动机飞行。Hydromatic 于 20 世纪 30 年代末投入生产,正好赶上二战期间高性能军用和运输机的要求。螺旋桨的性能、耐用性和可靠性为美国和盟军空军的成功做出了重大贡献。战后,Hydromatic 设计允许加入其他重要功能,包括反向螺距,这通过缩短大型商用运输机的着陆滑行时间提供了另一种安全措施。其他竞争性螺旋桨,采用液压机械或电动机驱动,从未达到 Hydromatic 的可靠性和广泛应用。
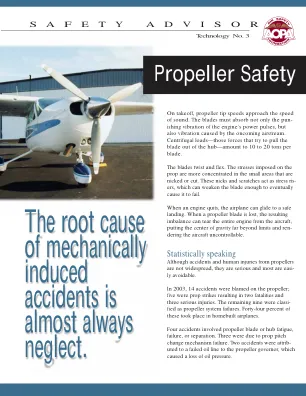
螺旋桨安全 - Spilve.lv
开关和磁电机断裂或松动。在这种情况下,一个或两个磁电机可能“热”或随时准备在螺旋桨转动时发出火花。要测试它们,不要像往常一样用混合控制关闭发动机,而是使用钥匙。让发动机正常冷却并怠速。慢慢地将钥匙从右、左移动到关闭位置。发动机转速应在两个单独的磁电机位置略微下降,并在关闭位置完全关闭。让螺旋桨停止,然后将混合气移到怠速切断位置。不要试图在发动机停止前“抓住”它,因为可能会发生危险的回火。如果钥匙处于关闭位置时发动机没有停止,请使用混合气将其关闭,在螺旋桨上明显标记为“热”,并立即联系维护人员。

先进的涡轮螺旋桨发动机、螺旋桨风扇发动机和涡轮喷气发动机旁路发动机...
- První brnìnská strojírna Velká Bíteš, a.s., PBS, - Centre de Recherche en Aéronautique, ASBL, CENAERO, - Technische Universität München, Institute of Energy Systems, IES, - Swedish Defence Research Agency, FOI, - Université de Liège, ULg,
螺旋桨认证规范 CS-P - EASA
(3) 必须证明危险螺旋桨效应不会以超过“极小概率”的概率发生。单个故障的估计概率可能不够精确,无法评估危险螺旋桨效应的总发生率。对于螺旋桨认证,如果可以预测由单个故障引起的危险螺旋桨效应的概率不超过每螺旋桨飞行小时 1x10 -8,则可以认为本段的目的已经实现。还应承认,在处理这种低数量级的概率时,不可能有绝对的证据,必须依靠工程判断和以前的经验,并结合合理的设计和测试理念。

Aero-Naut CAMFolding 螺旋桨的性能测试
无人驾驶飞行器 (UAV) 越来越受欢迎,这得益于其在民用、教育、政府和军事领域的应用。然而,有限的机载能量存储严重限制了飞行时间并最终影响可用性。推进系统在 UAV 的总能耗中起着至关重要的作用;因此,有必要针对给定的任务概况确定推进系统组件(即螺旋桨、电动机和电子速度控制器 (ESC))的最佳组合。不同组件有数百种选择,但大多数组件几乎没有性能规格。通过研究各种现有的长航时飞机,Aero-Naut CAM 碳纤维折叠螺旋桨被确定为最常用的商用现货螺旋桨类型。然而,公开文献中没有关于 Aero-Naut CAM 碳纤维折叠螺旋桨的性能数据。本文介绍了 40 个 Aero-Naut CAM 碳纤维螺旋桨的性能测试,这些螺旋桨为 2 叶片配置,直径为 9 到 16 英寸,螺距值各不相同。螺旋桨的测试转速为 3,000 到 7,000 RPM,前进流为 8 到 80 ft/s,具体取决于螺旋桨和测试设备的限制。本文介绍了在静态和前进流条件下测试的 40 个螺旋桨的结果,并讨论了几个关键的观察结果。生成的数据将在 UIUC 上提供下载
螺旋桨 CS-P 认证规范 - EASA
(3) 必须证明危险螺旋桨效应不会以超过“极小概率”的概率发生。单个故障的估计概率可能不够精确,无法评估危险螺旋桨效应的总发生率。对于螺旋桨认证,如果可以预测由单个故障引起的危险螺旋桨效应的概率不超过每螺旋桨飞行小时 1x10 -8,则可以认为本段的目的已经实现。还应承认,在处理这种低数量级的概率时,不可能有绝对的证据,必须依靠工程判断和以前的经验,并结合合理的设计和测试理念。