XiaoMi-AI文件搜索系统
World File Search System行人

使用YOLO V5与
摘要这项研究提出了一种创新的视频监视中人行人检测方法,利用Yolov5的功率(您只看一次版本5)与基于光感知融合的功能提取相结合。所提出的方法旨在在不同的照明条件下提高行人检测系统的准确性和效率。yolov5以其实时对象检测功能而闻名,与一种新型的特征提取技术集成,该技术融合了来自多个光感知传感器的信息。这种融合策略允许模型在不同的照明方案中适应和稳健。实验结果证明了所提出的方法的优越性,实现了出色的性能。Yolov5与基于光感知的特征提取的融合,展示了行人检测中有希望的进步,以解决现实监视环境中动态照明条件带来的挑战。关键字:行人检测,视频监视,Yolov5,光感知融合,特征提取

利用联邦资金机会开展社区行动计划
加利福尼亚州旧金山市获得资金解决田德隆区的行人安全问题,该地区行人被汽车撞伤或撞死的概率是该市其他地区的 10 倍。碰撞事故遍布整个街区,田德隆区的每条街道都位于该市的 HIN 上。主要的碰撞因素包括闯红灯、超速、在人行横道上不让行人以及不安全的转弯。田德隆区是老年人和残疾人等弱势群体的家园,他们通常前往附近的老年中心、公共图书馆、教堂和公共卫生设施。

中央米尔顿·凯恩斯(Milton Keynes)的场所制定原则评论
现在有建筑物在行人的后部,需要运送和偶尔停车。这些仔细整合到照明和美化策略中,以便实现清晰的行人区域,连续的树木线和有效的照明。 一条9.5m宽的人行道允许在外行的后部有一条连续的树线。 这将有助于威慑人行道上的停车。仔细整合到照明和美化策略中,以便实现清晰的行人区域,连续的树木线和有效的照明。一条9.5m宽的人行道允许在外行的后部有一条连续的树线。这将有助于威慑人行道上的停车。

ASFM:腿部机器人社会导航的增强社会力量模型
摘要 - 机器人技术中的社会导航主要涉及通过人口掩护的区域指导移动机器人,并且行人舒适度与有效的途径进行平衡。al-尽管在该领域已经看到了进步,但解决机器人无缝集成到行人环境中的解决方案仍然难以捉摸。在本文中,开发了一种用于腿部机器人的社会力量模型,利用视觉感知来进行人类本地化。特别是引入了增强的社会力量模型,并结合了基于行人行动的排斥力量和回避行为的精致解释,以及目标以下机制。通过各种情况,包括与即将到来的行人,人群和阻塞路径的相互作用,对四足机器人进行实验评估,这表明,所提出的增强模型在先前的基线方法上以选择的路径长度,平均速度以及有效和有效的社交导航的时间来显着改善基线方法。代码是开源的,而视频演示可以在项目的网页上找到:https://rpl-cs-ucl.github.io/asfm/
神经炎症:正常衰老和与年龄相关的神经退行性疾病之间的紧密线恐怖行为和行人行为
在发布政策中指定了此版本的手稿的重复使用条款和条件。使用受版权保护的作品需要权利持有人(作者或出版商)的同意。可根据创意共享许可证或发布者的定制许可提供的作品可根据其中包含的条款和条件使用。有关更多信息和条款和条件,请参见编辑网站。此项目是从IrisUniversitàPolitecnicadelle Marche(https://iris.univpm.it)下载的。引用时,请参阅已发布的版本。
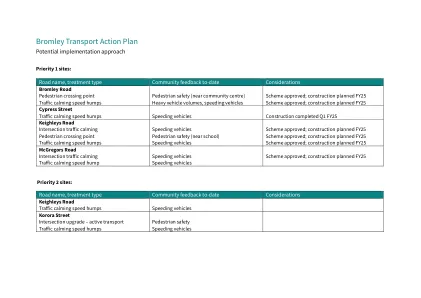
Bromley运输行动计划
道路名称,治疗类型社区反馈待遇待办事项,布罗姆利公路行人穿越点行人安全(近社区中心)计划已批准;施工计划的25财年交通镇定速度驼峰载有重型车辆量,超速车辆计划已批准;施工计划的25财年赛普拉斯街道交通镇定速度驼峰超速车辆建设完成了Q1 FY25 Keighleys Road交叉路口交通交通镇定的超速车辆计划批准;施工计划的25财年行人穿越点行人安全(近学校)批准;施工计划的25财年交通镇定速度驼峰超速车辆计划已批准;施工计划的FY25 McGregors Road交叉路口交通镇定的超速车辆计划已批准;施工计划的FY25交通镇定速度驼峰超速车辆
附录C:第7轮AHSC颁奖项目摘要
房屋位于圣克鲁斯市区的公交里奇。它距计划的新巴士仓库仅几百英尺,这将改善前进时间并使公交服务电气化,从而为居民和周边社区提供福利。为了提高行人安全和进入,该项目将在圣洛伦佐河两侧的圣克鲁斯河步行(Santa Cruz Riverwalk)穿过市区。这个高影响力的项目是一个关键的行人便利设施和旅游景点,可将旅游带到市区。通过行人尺度照明,改进的ADA访问和更好的材料将其升级,将有助于该地区的整体美化。
房地产开发框架,2023-2033。
底楼,创意枢纽是行人行人天桥登陆的高度突出的空间。该空间以“市政厅”概念构想,以举办各种事件以及为更非正式的社交空间配置的灵活性。它已成为其用户的瞬态空间。随着上述地板的创造性活动流动,中央中庭可见,它有机会蓬勃发展并更好地反映其所需的活动。

法律、发明家与人工智能
法律存在人工智能问题。法律体系一直拒绝承认人工智能 (AI) 不断进步的能力,导致了前后矛盾的法律结果。2018 年,一辆由 Uber 开发的 AI 系统驱动的自动驾驶汽车撞死了一名行人。1 美国国家运输安全委员会 (NTSB) 在调查结束后认定,Uber 的 AI 系统未能正确识别和预测行人的路径,导致车辆撞死行人。2 尽管 NTSB 得出了这样的结论,但 Uber 并未因死亡事件承担任何刑事责任。3 只有当时在车内负责监控的人类乘客被指控过失杀人。4 目前尚不清楚 Uber 是否会被追究民事责任,因为该公司在事故发生后两周内先发制人地与死者家属达成和解。5
![arxiv:2501.05100v1 [physics.soc-ph] 2025年1月9日](/simg/a\a171acff4261daef0608383a06defdd468aa84f4.webp)
arxiv:2501.05100v1 [physics.soc-ph] 2025年1月9日
摘要:在现有文献中,行人动力学模型成功捕获了诸如车道形成,疏散,瓶颈,人群相交等各种复杂场景。然而,由于过程中缺乏人类智能,许多模型,尤其是基于力量的模型,都难以复制简单而真实的情景。在这项研究中,我们提出了一种新颖的可变目标方法(VGA),该方法将人类智能纳入行人dynamics模型中,从而大大提高了他们的效率和现实主义。VGA介绍了多个中间目标的概念,称为可变目标,这些目标指导行人到他们的最终目的地,同时最大程度地减少互动和破坏。这些可变目标充当指导系统,允许过渡和自适应导航。通过战略性地定位可变目标,VGA引入了一个随机性。这使模型可以在相同条件下模拟各种行人路径,以反映人类决策的多样性。除了在简单方案中的有效性外,VGA还展示了复制高密度方案(例如车道形成)的强劲性能,提供了与现实世界中数据匹配的结果。