XiaoMi-AI文件搜索系统
World File Search System街景
许可协议计划表(针对街景)
• 将此表清楚地标记为“许可协议平面图表”。 • 将此表放在平面图中,与场地平面图/分级/铺路表或公用设施表相邻。 • 编号应采用“LA 1 of 3”的格式。 • 格式为 24" x 36" 施工图和详细平面图表 pdf,带有北箭头、比例尺、所有改进的空间尺寸,并遵守传统工程的基本做法。工程师必须在许可协议平面图表上签字、盖章并注明日期。 • 该计划必须符合所有城市手册中的最低标准、规范和指南。这包括但不限于城市标准和规范、交通标准手册和环境标准手册。所有提交文件必须符合城市、州和联邦法律。
可持续发展行动 街景 - Actis
对气候危机影响的预测在本质上似乎是圣经式的——干旱和洪水、饥荒和极端风暴、生态系统崩溃以及海洋和大气环流的破坏。其中一些物理变化涉及气候系统的阈值,超过该阈值,重大影响就会加速或变得不可逆转和不可阻挡。气候系统的复杂性意味着许多结果仍然未知——当阈值被突破并且生物物理系统崩溃时,直接影响可能会变得非线性。我们可能在某些地区面临严重的粮食和水资源短缺、气候难民的出现以及大规模移民、流离失所和冲突——从而引发我们的政治和民主制度的侵蚀,而这些制度本身对于找到解决方案至关重要。我们正在进入未知领域——见图 1。

生物多样性的街景中的栖息地增强
(Shorea Platyclados),Resak Irian(梵蒂冈Rassak),Chendarah(Horsfieldia Irya),Wild Tamarind(Cojoba div>

城市街景的视觉复杂性:人类与计算机视觉
抽象理解城市环境的视觉复杂性可能会改善城市设计策略,并限制由于广告,道路标牌,电信系统和机械而引起的视觉污染。本文旨在通过向一组450个以上的互联网用户提交一组地理参考的照片来量化城市街景中的视觉复杂性。将本调查发出的平均复杂性排名与一组计算机视觉预测进行了比较,试图找到最佳匹配。总的来说,一个计算机视觉指标可以全面匹配调查结果,并未清楚地从分析中出现,但是一组感知的假设表明,某些类别的刺激更相关。结果表明,具有对比颜色区域和锋利边缘的图像如何更容易驱动高复杂性的感觉。

激光雷达数据和街景图像在道路监控中的应用...
在道路环境监测中使用激光扫描数据和街道视图图像的利用。主要重点是道路损坏和排水。还发现了附近的道路场景。Terramodeler和Terrascan软件用于研究。使用五个不同的LiDAR数据集检测道路损坏和排水。可从Jakomäki地区获得基于移动器和直升机的LIDAR数据。在Rauma情况下,从直升机中收集了两个数据集,但点密度不同。此外,对于基于直升机的LiDAR数据,Hyvinkää案中Blomstreet Service也提供了街道视图图像。比较了数据集之间的结果。目的是研究是否可以从具有不同点密度的几个数据集中找到相同的损失。单个树木检测的LIDAR数据是由Korppoo地区的直升机收集的。树的位置还用速度计测量,以获取自动检测的参考数据。树木的高度是从点云手动确定的。将手动测量的高度和位置与自动检测到的高度进行了比较。

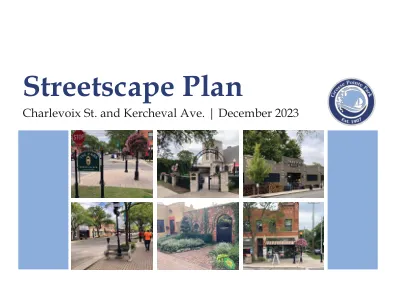
更好的街道计划 - 第 138.1 节
所有受规划法规第 138.1 条约束的项目都必须准备并提交一份详细且按比例缩放的概念街景设计规划,该规划必须符合最低准则,详情如下。请填写下表中的所有信息,以帮助简化和加快城市对您的街景规划以及所需和拟议的改进的审查。虽然规划法规第 138.1 条并不严格要求同时提交现有和拟议的街景规划,但除了最简单的项目外,建议所有项目都同时提交,以方便和加快城市审查。

在公共街道上遇到自动机器人
部署在公共设置中的机器人输入人类生活和工作的空间。公共HRI的研究倾向于优先考虑直接和故意的互动。但这错过了对机器人的最常见响应形式,范围从微妙的相互作用到几乎忽略它们。从视频录制的基础上采用民族方法学方法,我们展示了从物理环境的社会集会(街景)和日常街头生活的社会环境的社会集会(街道景观)的角度来看,机器人如何嵌入城市空间中。我们表明,由于街道的实际工作,这种机器人是如何通过这些空间“授予通道”的。我们详细介绍了街景的偶然性,引起人们对其各种成员以及他们正在做的住宿工作的关注。我们证明了在整个部署过程中研究机器人的重要性,并侧重于成员的互动工作。

在公共街道上遇到自动机器人
部署在公共设置中的机器人输入人类生活和工作的空间。公共HRI的研究倾向于优先考虑直接和故意的互动。但这错过了对机器人的最常见响应形式,范围从微妙的相互作用到几乎忽略它们。从视频录制的基础上采用民族方法学方法,我们展示了从物理环境的社会集会(街景)和日常街头生活的社会环境的社会集会(街道景观)的角度来看,机器人如何嵌入城市空间中。我们表明,由于街道的实际工作,这种机器人是如何通过这些空间“授予通道”的。我们详细介绍了街景的偶然性,引起人们对其各种成员以及他们正在做的住宿工作的关注。我们证明了在整个部署过程中研究机器人的重要性,并侧重于成员的互动工作。