XiaoMi-AI文件搜索系统
World File Search System表示

脱机多任务表示增强学习
离线增强学习的最新进展(RL)(Levine等人,2020年)使用预采用的数据集为现实世界中的培训政策开辟了可能的可能性(Kalashnikov等人。,2018年; Rafailov等。,2021; Kalashnikov等。,2021),自然语言处理(Jaques等人,2019年),教育(De Lima and Krohling,2021年),电力供应(Zhan等人,2022)和医疗保健(Guez等人,2008年; Shortreed等。,2011年; Wang等。,2018年;基利安等人。,2020)。虽然大多数离线RL研究都集中在单任务问题上,但是在许多实际情况下,多个任务是相关的,并且通过利用所有可用数据共同学习多个任务是有益的(Kalashnikov等人。,2018年; Yu等。,2021,2022; Xie and Finn,2022)。在这种情况下,一种流行的方法是多任务表示学习,该代理的目的是通过在相关任务之间提取共享的低维表示功能来解决问题,然后在此通用表示上使用简单功能(例如线性)来解决每个任务(Caruana,1997; Baxter,2000)。尽管多任务表示学习取得了经验成功,尤其是在增强学习在降低样品复杂性方面的功效方面的实现(Teh等人,2017年; Sodhani等。,2021; Arulkumaran等。,2022),对其的理论理解仍处于早期阶段(Brunskill和Li,2013年; Calandriello等人。,2014年; Arora等。,2020年; Eramo和Al。,2020年;胡和al。,2021; lu和al。,2021; Pacchiano的磨坊,2022年)。虽然


将机器人几何形状表示为距离字段
摘要 - 在这项工作中,我们提出了一种新的方法,将机器人几何形状表示为距离场(RDF),该方法将签名距离场(SDF)的原理扩展到铰接的运动链。我们的方法采用了伯恩斯坦多项式的组合,以高精度和效率编码每个机器人链路的签名距离,同时确保SDF的数学连续性和不同性。我们进一步利用机器人的运动学链来在关节空间中产生SDF表示,从而允许以任意关节配置进行稳健的距离查询。提议的RDF表示在任务和关节空间中都是可区分和平滑的,使其直接集成到优化问题。此外,机器人的0级集合对应于机器人表面,可以将其无缝整合到全身操纵任务中。我们在模拟和7轴Franka Emika机器人中进行了各种经验,与基线方法进行了比较,并证明了其在避免碰撞和全身操纵任务方面的效率。项目页面:https://sites.google.com/view/lrdf/home

人类行为表示的参考架构
Wim Huiskamp 是荷兰 TNO 国防、安保和安全部门 M&S 部门的建模、仿真和游戏首席科学家。他获得了荷兰特温特理工大学电气工程硕士学位。他的研究领域包括系统架构和分布式实时仿真问题。 Wim 领导 TNO 代表荷兰国防部开展的模拟研究项目。 Wim 是北约建模与仿真小组 (NMSG) 的成员,并担任多个 NMSG 技术工作组的成员和主席。他是 NMSG 的前任主席、NMSG M&S 标准小组 (MS3) 的前任主席,并且是 NMSG 与仿真互操作性标准组织 SISO 的联络人。

混合量子表示和希尔伯特(Hilbert)
摘要。目的:这项工作旨在应用量子希尔伯特(Hilbert)争夺,以增强图像水印的安全性和完整性,而不会影响视觉质量退化。对被调查方法的进一步概念可能会为传统的水印方法提供一个很好的解决方案,以通过新的量子计算概念解决数字图像安全性和完整性的一些问题。方法:本文回顾了量子希尔伯特(Hilbert)争夺,其计算复杂性为𝑂(𝑛22 2)。该过程涉及将图像编码为量子状态,并用希尔伯特曲线置换量子,并使用量子门嵌入水印。结果:定量性能评估指标,例如峰信号与噪声比(PSNR)和结构相似性指数(SSIM),显示出高峰信号与噪声比(PSNR)值的高峰值信号(PSNR)值,从56.13 dB到57.87 db至57.87 db,结构相似性指数(SIM)(SSIM)(SIM)(SIM)(SIM)(SIM)(SIM)来自0.9985至0.985至0.999990,相应地愿意。这证明了质量降解非常小,结构的细节得到很好的维护。新颖性:所提出的方法将量子计算与传统水印步骤集成在一起,以在数字水印中采用安全有效的方法。进一步的开发应集中于改善有关计算效率的量子电路,将方法的适用性扩展到广泛的图像上,以及在水印中的各种情况,并通过结合量子和经典方法来提高性能和可伸缩性,以找到混合方法。关键字:希尔伯特(Hilbert)争夺,图像水印,量子希尔伯特(Hilbert)争夺,2024年7月收到的绩效测量 / 2024年10月修订 / 2024年11月接受的这项工作已在创意共享4.0国际许可下获得许可。
量子和经典的波动算子表示...
在描述物理系统时,数学表示的选择非常重要,而这种选择通常由手头问题的性质决定。在这里,我们研究了鲜为人知的量子动力学波算子表示,并探索了它与量子动力学标准方法(如维格纳相空间函数)的联系。该方法以密度矩阵的平方根为中心,因此比标准表示具有几个不寻常的优势。通过将其与从量子信息中引入的净化技术相结合,我们能够获得许多结果。这种形式不仅能够在量子和经典动力学的相和希尔伯特空间表示之间提供自然的桥梁,我们还发现波算子表示可以导致实时间和虚时间动力学的新型半经典近似,以及与经典极限的透明对应。然后证明存在许多场景(例如热化),其中波算子表示具有等效的幺正演化,这对应于密度矩阵的非线性实时动力学。我们认为,波算子提供了一种将以前不相关的表示联系起来的新视角,并且是无法以其他方式保证正性的场景(例如混合)的自然候选模型。

嵌入式数据表示 - Yvonne Jansen
摘要 —我们介绍嵌入式数据表示,即使用与数据所指的物理空间、对象和实体深度集成的数据的视觉和物理表示。轻量级无线显示器、混合现实硬件和自动驾驶汽车等技术使得在上下文中显示数据变得越来越容易。虽然研究人员和艺术家已经开始创建嵌入式数据表示,但描述和比较这些方法所需的优势、权衡,甚至语言仍未被探索。在本文中,我们形式化了物理数据指称的概念——数据对应的现实世界实体和空间——并研究指称与其数据的视觉和物理表示之间的关系。我们区分了情境表示(显示靠近数据指称的数据)和嵌入式表示(显示数据以使其在空间上与数据指称相重合)。通过借鉴可视化、普适计算和艺术中的例子,我们探讨了空间间接、尺度和交互在嵌入式表示中的作用。我们还研究了非情境化、情境化和嵌入式数据显示之间的权衡,包括可视化和物理化。根据我们的观察,我们发现了嵌入式数据表示的各种设计挑战,并提出了未来研究和应用的机会。
Plaris Lithimum 80V- PowerPoint的表示
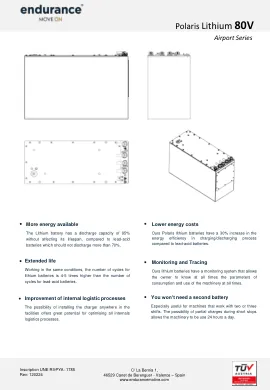
Battery Model 80V / 420 Ah 80V / 525 Ah 80V / 630 Ah 80V / 735 Ah 80V/840 Ah Cell Technology Lithium/ Iron Phospate (LiFePO4) Nominal Voltage 83.2 V Rated Capacity 420 Ah 525 Ah 630 Ah 735 Ah 840 Ah Rated Energy Content 34,944 KWh 43,680 KWh 52,416 KWh 61,152 KWH 69,888 kWhnº在80%SOH 4000放电

费米子边界算子的表示
边界算子是一个线性算子,它作用于一组高维二元点(单纯形),并将它们映射到它们的边界上。这种边界图是许多应用中的关键组件之一,包括微分方程、机器学习、计算几何、机器视觉和控制系统。我们考虑在量子计算机上表示完整边界算子的问题。我们首先证明边界算子具有特殊结构,形式为费米子产生和湮灭算子的完全和。然后,我们利用这些算子成对反对换的事实来生成一个 O(n) 深度电路,该电路精确实现边界算子,而没有任何 Trotterization 或泰勒级数近似误差。错误越少,获得所需精度所需的拍摄次数就越多。

量子计算的全纯表示
我们利用量子态的 Segal-Bargmann 表示法研究玻色子量子计算。我们认为这种全纯表示法是一种自然表示法,它不仅使用复分析的基本元素给出了玻色子量子计算的规范描述,而且还提供了描绘离散变量和连续变量量子信息理论之间界限的统一图景。利用这种表示法,我们表明,高斯哈密顿量下单个玻色子模式的演化可以描述为经典 Calogero-Moser 粒子的可积动力学系统,对应于全纯函数的零点,以及高斯参数的共形演化。我们解释说,Calogero-Moser 动力学是由于玻色子希尔伯特空间的独特特征(例如压缩)所致。然后,我们将这种全纯表示的性质推广到多模情况,推导出非高斯量子态层次结构,并将纠缠与全纯函数的因式分解性质联系起来。最后,我们将这种形式应用于离散和连续变量量子测量,并获得亚通用模型的分类,这些模型是玻色子采样和高斯量子计算的推广。