XiaoMi-AI文件搜索系统
World File Search System装置的

超声波装置的改进...
信号................................................................................................................ 107
半导体装置的制造和表征
3 Annie Puri女性M.Tech。(optoelectronics)anniepuri@scl.gov.in半导体实验室,旁遮普省Mohali 4 Mritunjay Rai Male Ph.D. (热图像)er.mritunjayrai@gmail.com srmu,勒克瑙,北方邦5 Alkesh Agrawal男性M.Tech。(数字通信)Alkesh.agrawal26@gmail.com 6 Jay Kumar Pandey Male Ph.D. (可再生能源)jay.pandey@srmu.ac.in 7 Chanchal女性M.Sc.(电子)Chanchal0210saraswat@gmail.com德里大学,德里8 Mohd。Rehan Ansari Male M.Sc. (电子)mransari@du.ac.in 9 Vinod Parmar Male Ph.D. (物理和生物医学工程)Rehan Ansari Male M.Sc.(电子)mransari@du.ac.in 9 Vinod Parmar Male Ph.D. (物理和生物医学工程)
电气装置的参考书目设计
工业技术和服务中心的电力和机械研讨会的学习过程56,Guerrero Iguala de La Independencia。 div><布尔加斯当代困境:教育,政治和价值观,8,1-27。 https://research.bsco.com/linkprocessor/plink?id=71E30771-2D44-35EC-9FCA-9FCA- C3A15FEAF1F8
雨水处理装置的运行及维护...
本出版物严格遵守奥克兰地区议会 (ARC) 的版权和出版物中的其他知识产权(如果有)。本出版物的用户只能以安全的数字媒体或硬拷贝形式访问、复制和使用本出版物,用于与个人、公共服务或教育目的有关的负责任的真正的非商业目的,前提是本出版物必须准确复制,并在任何使用或复制时附上其来源、出版日期和作者的正确归属。未经 ARC 事先书面同意,不得以任何方式将本出版物用于任何商业目的。ARC 不提供任何保证,包括但不限于通过本出版物提供的信息或数据(包括第三方数据)的可用性、准确性、完整性、时效性或可靠性,并明确声明(在法律允许的最大范围内)对因您使用或依赖本出版物或通过本出版物提供的信息和数据而造成的任何损害或损失不承担任何责任。本出版物及其所含信息和数据均按“原样”提供。
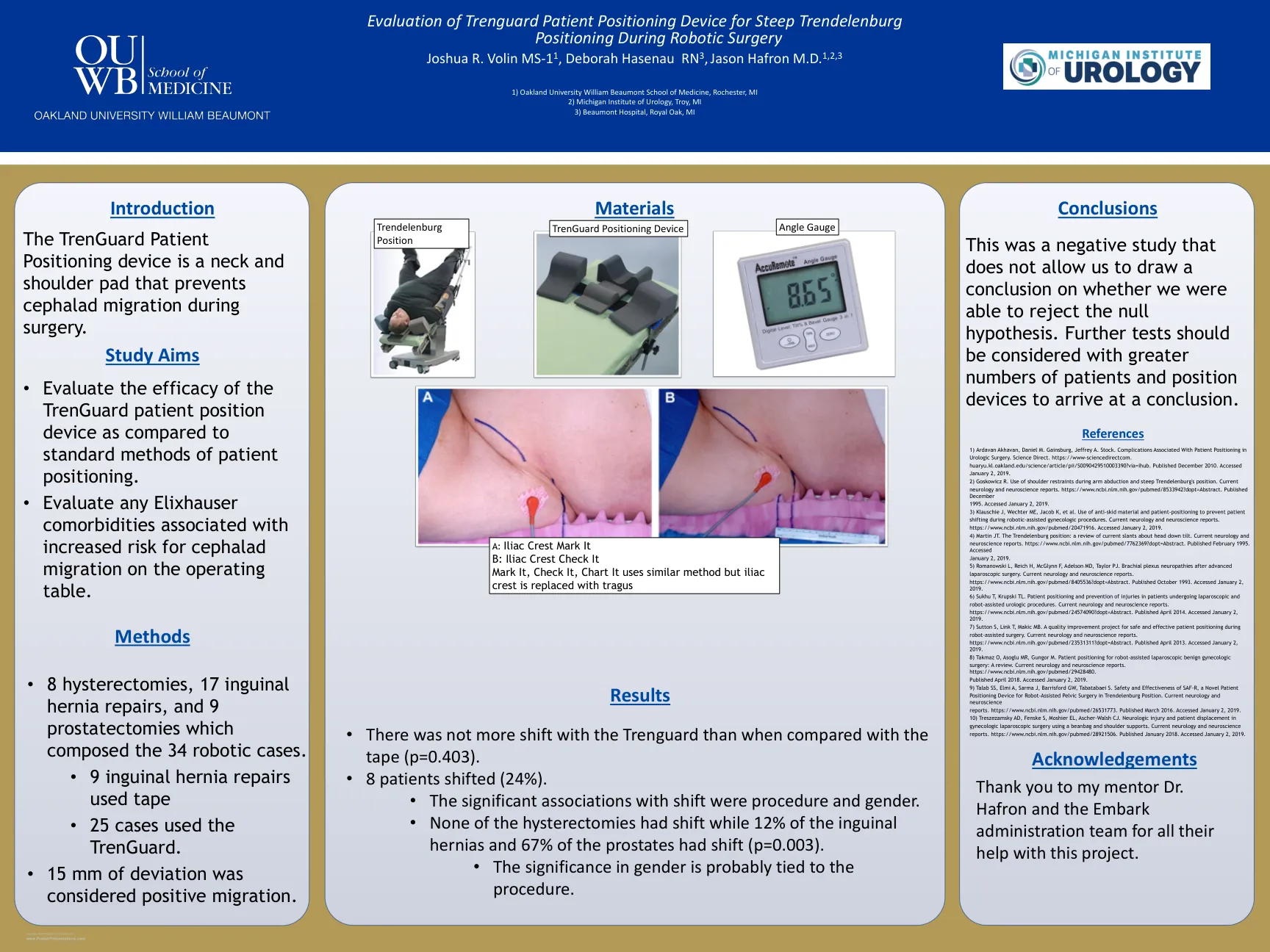
Trenguard 患者定位装置的评估...
1) Ardavan Akhavan、Daniel M. Gainsburg、Jeffrey A. Stock。泌尿外科手术中与患者体位相关的并发症。Science Direct。https://www-sciencedirectcom. huaryu.kl.oakland.edu/science/article/pii/S0090429510003390?via=ihub。2010 年 12 月出版。2019 年 1 月 2 日访问。2) Goskowicz R。手臂外展和陡峭的 Trendelenburg 体位期间肩部约束的使用。当前神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/8533942?dopt=Abstract。1995 年 12 月出版。2019 年 1 月 2 日访问。3) Klauschie J、Wechter ME、Jacob K 等人。使用防滑材料和患者定位来防止患者在机器人辅助妇科手术中移位。当前的神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/20471916。访问时间:2019 年 1 月 2 日。4) Martin JT。Trendelenburg 体位:对当前头部向下倾斜倾向的回顾。当前的神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/7762369?dopt=Abstract。1995 年 2 月出版。访问时间:2019 年 1 月 2 日。5) Romanowski L、Reich H、McGlynn F、Adelson MD、Taylor PJ。高级腹腔镜手术后的臂丛神经病变。当前的神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/8405536?dopt=Abstract。 1993 年 10 月出版。2019 年 1 月 2 日访问。6) Sukhu T、Krupski TL。接受腹腔镜和机器人辅助泌尿外科手术的患者定位和损伤预防。当前的神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/24574090?dopt=Abstract。2014 年 4 月出版。2019 年 1 月 2 日访问。7) Sutton S、Link T、Makic MB。机器人辅助手术期间安全有效的患者定位质量改进项目。当前的神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/23531311?dopt=Abstract。 2013 年 4 月出版。2019 年 1 月 2 日访问。8) Takmaz O、Asoglu MR、Gungor M。机器人辅助腹腔镜良性妇科手术的患者定位:综述。当前神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/29428480。2018 年 4 月出版。2019 年 1 月 2 日访问。9) Talab SS、Elmi A、Sarma J、Barrisford GW、Tabatabaei S。SAF-R(一种用于机器人辅助床位盆腔手术的新型患者定位装置)的安全性和有效性。当前神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/26531773。 2016 年 3 月出版。2019 年 1 月 2 日访问。10) Treszezamsky AD、Fenske S、Moshier EL、Ascher-Walsh CJ。使用豆袋和肩部支撑的妇科腹腔镜手术中的神经损伤和患者位移。当前神经病学和神经科学报告。https://www.ncbi.nlm.nih.gov/pubmed/28921506。2018 年 1 月出版。2019 年 1 月 2 日访问。
人工智能交互装置的设计和评估......
摘要 人工智能 (AI) 已被证明是公共部门保存、分析、管理和展示文化遗产的有效工具。然而,很少有研究关注人工智能对公众参与的具体影响,特别是在文化遗产学习方面。本文旨在通过设计和评估结合图像风格转换和面部识别技术的交互式装置,研究人工智能对公众文化遗产学习的影响。我们通过对话分析、访谈和问卷调查,重点评估参与者在文化遗产学习过程中的表现以及行为和知识方面的学习成果。结果表明,交互式装置促进了用户生成的五个主要类别的学习对话:感知对话(30.60%)、战略对话(24.89%)、连接对话(16.40%)、概念对话(15.22%)和情感对话(12.90%)。此外,它促进了实验后文化遗产知识的获取和在线下和线上平台上分享文化遗产的行为。

研究文章 制动装置的建模与仿真...
航空母舰上飞机的拦阻动力学涉及绳索中瞬态波的传播过程和飞机的平稳减速过程。这给整个过程的模拟带来了很大的挑战,因为前者需要较小的时间步长来保证稳定性,而后者需要较大的时间步长来减少计算时间。针对这一问题,本文提出了一种采用变时间步长积分方案的拦阻装置系统全尺寸多体动力学模型。特别地,采用一种能够描述三维空间中任意大位移和转动的新型缆单元来网格化钢丝绳,并采用阻尼力来模拟液压系统的影响。然后,研究了着舰过程中钢丝绳的应力。结果表明,应力峰值主要来源于应力波在甲板滑轮间的传播、反射和叠加。偏离中心线着陆时的最大应力略小于沿中心线着陆时的最大应力。本文提出的多体进近和拦阻装置系统模型也为整个机构的设计和优化提供了一种有效的方法。

便携式空气净化装置的设计与实现
摘要:便携式空气净化装置在维持室内空气质量和促进健康生活环境方面发挥着至关重要的作用。本研究介绍了一种空气净化装置的设计和实施,旨在有效去除空气中的污染物并改善整体室内空气质量。该装置包含一个过滤系统,用于捕获空气中的颗粒物和过敏原。此外,还采用紫外线 (UV) 光杀菌技术来中和细菌和病毒等有害微生物,进一步增强了该装置的功效。该设备具有可调节的风扇速度和直观的控制功能,允许用户根据自己的喜好和环境条件自定义操作。该系统可改善室内空气质量,突出了该装置在为医院、住宅和商业空间提供清洁健康空气方面的有效性。
绿色氢气生产装置的优化
利用可再生能源电解产生的氢气是化石燃料产生的高排放氢气的有前途的替代品。低排放氢气有可能减少许多工业领域的碳排放,例如化肥、交通运输和铁行业。尽管如此,低排放氢气的快速普及却因其高昂的生产成本而受到阻碍。为了降低电转氢系统的成本,行业必须实施最佳规模和生产策略。电解器的功率、储罐、电池容量和生产计划必须完美匹配氢气需求和电力供应。本论文开发了一种基于非线性优化模型的方法来寻找电转氢系统的最佳设计和尺寸,并找到设计参数之间的协同作用。该方法适应广泛的工业限制、电价、可再生能源可用性、电解技术和特殊要求。还进行了参数评估研究,为模型提供相关值和功能。两个不同的案例研究——一个侧重于移动性氢气生产,另一个侧重于甲醇生产——说明了所开发方法的应用。这些案例研究提供了有关如何使用和分析模型的见解。最后,利用蒙特卡洛方法对开发的模型进行敏感性研究。这项敏感性研究评估了生产成本和最佳电解器产量的不确定性。它还提供了对电转氢系统最具成本驱动力的特征的见解。

基于 PLC 的带倾斜装置的太阳能电池板
目前,许多替代能源似乎在技术上是可行的。其中之一就是太阳能(Kreider 和 Kreith,1981 年)。太阳能电池板是基本的太阳能转换组件。传统的太阳能电池板以一定的角度固定,限制了它们在一天中接受太阳照射的面积 [1-3]。因此,平均太阳能并不总是最大化。最初,由于地球在太阳系中的位置,太阳能电池板被放置在 23.5 度。根据太阳的位置倾斜电池板的程序由 PLC 提供。固定在电池板后面的倾角仪测量电池板的角度,并将反馈给 PLC[4,5]。PLC 控制电机为倾斜电池板的机构提供动力。太阳能电池板每小时在一分钟内倾斜九度。任何对现有程序的更改都可以通过人机界面进行修改。主要目的是分析框架结构对各种风力条件的影响[6,7]。