XiaoMi-AI文件搜索系统
World File Search System角运动
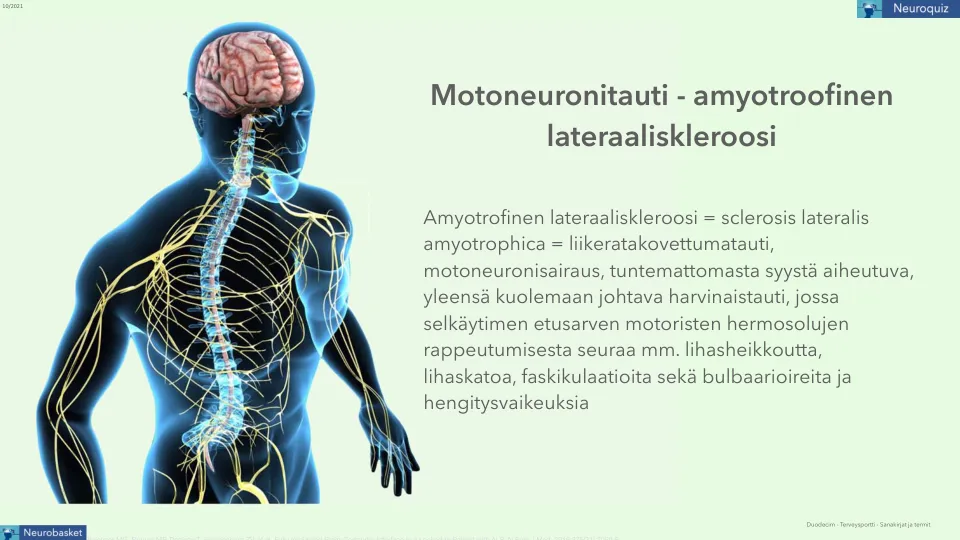
运动神经元疾病-肌萎缩侧索硬化症
肌萎缩侧索硬化症 = 肌萎缩侧索硬化症 = 运动神经元疾病,一种原因不明的罕见疾病,通常是致命的,脊髓前角运动神经元的退化会导致以下后果:肌肉无力、肌肉萎缩、肌束震颤以及延髓症状和呼吸困难
位置#895:海事自动式船舶(质量)的智能运动控制系统
为了稳定角运动,应根据陀螺仪,主动的鳍稳定器等提出一个主动稳定系统。通过利用实时船舶响应和情境意识模块的数据来响应实际的环境条件和个人扰动,提出的稳定系统将与传统的基于陀螺仪的系统不同。可以预见到,应在组合(i)半数模型中评估船舶行为模型和运动控制系统的动作,包括对环境负载和结构响应的描述,以及(ii)机器学习模型,以进行平滑适应和基于反馈的校准。PHD项目包括在现有质量平台上开发解决方案的实验室和现场测试。职责和任务

具有动态结构参数的滑臂四轴飞行器飞行控制
摘要 — 介绍了一种新型四轴飞行器的概念设计和飞行控制器。该设计能够在飞行过程中改变无人机的形状,以实现位置和姿态控制。我们考虑动态重心 ( CoG ),它会导致无人机的转动惯量 ( MoI ) 参数不断变化。这些动态结构参数在系统的稳定性和控制中起着至关重要的作用。四轴飞行器臂长是一个可变参数,它由基于姿态反馈的控制律驱动。MoI 参数是实时计算的,并纳入系统的运动方程中。无人机利用螺旋桨的角运动和可变的四轴飞行器臂长进行位置和导航控制。重心的运动空间是一个设计参数,它受执行器限制和系统稳定性要求的限制。提供了有关运动方程、飞行控制器设计和该系统可能应用的详细信息。此外,通过航路点导航任务和复杂轨迹跟踪的比较数值模拟对所提出的变形无人机系统进行了评估。
超音速
过去 30 年来,太空用陀螺仪技术不断发展,并取得了显著成果,产品应用十分广泛。在欧洲,光纤陀螺仪 (FOG) 技术为卫星应用提供了最高性能,目前正在满足所有当前任务需求。陀螺仪领域的高性能部分由美国的半球形谐振陀螺仪 (HRG) 技术主导。在欧洲,这项技术也(但最近)在地面应用中实现了非常高的性能。新陀螺仪技术领域是一个充满活力的战略研究领域,由众多高精度海洋、陆地和航空应用引领。目前应用于角运动和线性运动传感的一项有前途的技术是原子干涉仪 (AI),但尚未转化为产品。基于冷原子干涉 (CAI) 的陀螺仪已证明其性能指标比 FOG 产品高出约 2 个数量级。对于其他类型的用途,磁流体动力 (MHD) 技术可以在有限的体积和质量内实现非常高的带宽测量,从而实现镜子的主动视线稳定。

对由...引起的抖动的初步调查
I. 简介 激光束在大气中的传播与光通信、成像和定向能系统 [1,2,3,4] 相关。大气介质中折射率的统计随机波动会损害这些系统的功能和运行 [1]。光束控制系统的功能之一是跟踪和保持目标上的瞄准点,使抖动值小于 λ/D,其中 λ 是激光波长,D 是激光束直径或出射光瞳处的孔径。其他研究人员 [例如,见 5] 已经认识到,穿过湍流大气的运动会对激光束产生抖动或整体角运动。大气由大小从数百米到毫米不等的湍流结构组成。由风切变和热羽流产生的大气大尺度结构会产生称为外尺度的涡旋结构。在最小尺度的湍流中,能量通过粘性作用而消散。最大尺度和最小尺度之间是惯性子范围,其中湍流被认为是各向同性的,并且适用柯尔莫哥洛夫理论。研究表明,柯尔莫哥洛夫速度扰动与密度变化有关,因此,密度变化通过格拉德斯通-戴尔关系线性地引起折射率波动。这些变化由折射率结构函数 𝐶 𝑛 量化

阿丽亚娜 5 号 - 阿丽亚娜空间公司
2.7.3. GTO 双机发射的发射窗口 2.7.4. GTO 单机发射的发射窗口 2.7.5. 非 GTO 发射的发射窗口 2.7.6. 发射推迟 2.7.7. 升空前关闭发动机 2.8. 上升阶段的航天器定位 2.9. 分离条件 2.9.1. 定位性能 2.9.2. 分离模式和指向精度 2.9.2.1. 三轴稳定模式 2.9.2.2. 自旋稳定模式 2.9.3. 分离线速度和碰撞风险规避 2.9.4. 多重分离能力 第 3 章 环境条件 3.1. 一般要求 3.2. 机械环境 3.2.1. 静态加速度 3.2.1.1. 地面 3.2.1.2. 飞行中 3.2.2.稳态角运动 3.2.3. 正弦等效动力学 3.2.4. 随机振动 3.2.5. 声振动 3.2.5.1. 地面 3.2.5.2. 飞行中 3.2.6. 冲击 3.2.7. 整流罩下的静压 3.2.7.1. 地面 3.2.7.2. 飞行中 3.3. 热环境 3.3.1. 简介 3.3.2. 地面操作 3.3.2.1. CSG 设施环境 3.3.2.2. 整流罩或 SYLDA 5 下的热条件 3.3.3. 飞行环境 3.3.3.1. 整流罩抛弃前的热条件 3.3.3.2. 气动热通量和整流罩抛弃后的热条件 3.3.3.3. 其他通量 3.4. 清洁度和污染 3.4.1.环境中的洁净度 3.4.2. 沉积污染 3.4.2.1. 颗粒污染 3.4.2.2. 有机污染 3.5. 电磁环境 3.5.1. L/V 和范围 RF 系统 3.5.2. 电磁场 3.6. 环境验证
ARIANE 5 - 阿丽亚娜太空
2.7.3.GTO 双发发射窗口 2.7.4.GTO 单发发射窗口 2.7.5.非 GTO 发射窗口 2.7.6.发射推迟 2.7.7.升空前发动机关闭 2.8.上升阶段的航天器定位 2.9.分离条件 2.9.1.定位性能 2.9.2.分离模式和指向精度 2.9.2.1.三轴稳定模式 2.9.2.2.自旋稳定模式 2.9.3.分离线速度和碰撞风险规避 2.9.4。多分离能力 第 3 章。环境条件 3.1。一般 3.2。机械环境 3.2.1。静态加速度 3.2.1.1。地面 3.2.1.2。飞行中 3.2.2。稳态角运动 3.2.3。正弦等效动力学 3.2.4。随机振动 3.2.5。声振动 3.2.5.1。地面 3.2.5.2.飞行中 3.2.6.冲击 3.2.7.整流罩下的静压 3.2.7.1.地面 3.2.7.2.飞行中 3.3.热环境 3.3.1.简介 3.3.2.地面操作 3.3.2.1.CSG 设施环境 3.3.2.2.整流罩或 SYLDA 5 下的热条件 3.3.3.飞行环境 3.3.3.1.整流罩抛射前的热条件 3.3.3.2。整流罩抛射后的气动热通量和热条件 3.3.3.3。其他通量 3.4。清洁度和污染 3.4.1。环境中的清洁度水平 3.4.2。沉积污染 3.4.2.1。颗粒污染 3.4.2.2。有机污染 3.5。电磁环境 3.5.1。L/V 和范围 RF 系统 3.5.2。电磁场 3.6。环境验证

物理学博士后职位新型磁性微...
一般背景。将药物局部输送到人体难以接近的部位是成功治疗各种严重疾病(如癌症、缺血性心脏病或缺血性脑卒中)的关键。传统疗法要么副作用明显(注射的药物影响健康组织),要么由于这些部位附近的血液循环停滞而导致药物向目标部位的运输效率低下。磁性纳米载体(携带药物的纳米颗粒或磁性脂质体)在外部施加的磁场下沿血管网络引导并直接在目标部位(肿瘤组织或血凝块)释放药物,原则上可以克服这些问题 [1]。然而,由于梯度磁场的物理限制,这种技术不能轻易控制纳米载体通过分支血管网络的位移。磁性载体的形状各向异性和/或柔韧性可通过将磁场梯度与 3D 振荡磁场的复杂叠加,结合其平移、角运动或跳动运动,显著改善对其运动的远程控制 [2]。这种磁性载体被称为磁性微游泳者。在过去的几十年中,人们设计了各种类型的磁性微游泳者,并开发了不同的游泳策略。然而,据我们所知,它们仍然没有一个能满足临床应用的大部分标准。其中一些太大(几毫米大小的微型机器人)而无法穿过血管 [3],另一些则是使用非常复杂的方法制造的,并且/或者数量非常少,与实际应用不相容 [4]。最近,我们尼斯物理研究所 (INPHYNI, UMR 7010) 的研究小组已经证明,超小磁性纳米粒子 (

讲义 - IARE
1.1 航空电子、电子系统和电子学发展简介:“航空电子”一词源于航空和电子学的结合。它最早于 20 世纪 50 年代初在美国使用,此后得到了广泛的使用和认可,尽管必须指出,有时仍有必要向外行解释它的含义。本书中使用的术语“航空电子系统”或“航空电子子系统”是指飞机中任何依赖电子设备运行的系统,尽管该系统可能包含机电元件。例如,电传操纵 (FBW) 飞行控制系统依靠电子数字计算机有效运行,但系统中还有其他同样重要的元素。这些包括固态速率陀螺仪和加速度计,用于测量飞机的角运动和线性运动,以及大气数据传感器,用于测量高度、空速和入射角。还有飞行员的操纵杆和方向舵传感器组件以及电液伺服执行器,用于控制控制面的角位置。航空电子行业是全球数十亿美元的主要行业,现代军用或民用飞机上的航空电子设备可占飞机总成本的 30% 左右。对于海上巡逻/反潜飞机(或直升机),航空电子设备的这一数字更像是 40%,对于机载预警机(AWACS)而言,这一数字可能超过总成本的 75%。现代通用航空飞机也具有大量航空电子设备。例如,彩色头戴式显示器、GPS 卫星导航系统、无线电通信设备。1.2 电子设备的发展 航空电子设备可占其总成本的 10%。需要注意的是,无人驾驶飞机 (UMA) 完全依赖于航空电子系统。这些包括显示器、通信、数据输入和控制以及飞行控制。显示系统提供飞行员和飞机系统之间的视觉界面,包括