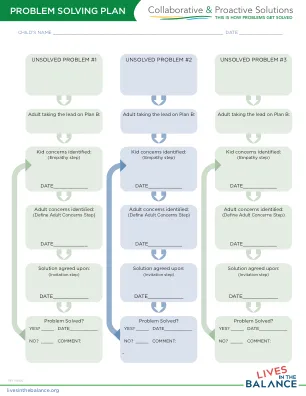
XiaoMi-AI文件搜索系统
World File Search System解决问题

解决问题
我们认为策略是一系列在问题空间中采取的步骤或操作符,目的是完成给定任务或解决问题(Newell & Simon,1972)。理论上,问题解决的任何变化都可能代表不同的策略。然而在实践中,我们经常将问题解决步骤中不显著的变化归为一种策略,并将代表“显著”不同方法的变化视为不同的策略。考虑图 1。策略 A 和策略 B 所表示的解决方案都包含三个类似的步骤。在第一步中,学生从等式的两边减去一个变量项(策略 A 中为 5x;策略 B 中为 3x)。在第二步中,使用策略 A 的学生从等式的两边减去 4,使用策略 B 的学生在两边加 6。在第三步中,每个学生将等式的两边除以系数。采用策略 C 的学生将前两个步骤合并为一个步骤,从等式的两边减去 3x-6。显然,策略 A 和策略 B 是类似的方法,可以视为单一策略的变体。能够识别和执行策略 C 的学生展示了一种更复杂的问题解决方法,可以视为使用与策略 A 或策略 B 截然不同的策略。



解决问题的解决方案
在印度北部的印度印度范围平原(IGP)中,普遍存在的稻麦种植系统(RWS)的标志是从10月至4月的麦芽量连续种植小麦,而从6月到九月。然而,这些农作物之间的过渡需要由于在种植小麦之前可用于土地准备的时间短,因此需要烧断残茬。这种做法对环境污染产生了重大贡献,并给人类和生态系统带来了健康风险。为了解决这个问题,必须采用农作物残留物的替代管理策略。利用残茬作为燃料,生物燃料的原料或纸浆和造纸行业的原材料提供有希望的解决方案。其中,生物炭是一个特别有效的选择。生物炭,源自农业废物的热解,不仅减轻了环境污染,还可以提高土壤健康,作物生产力和整体农业可持续性。我们的建议强调了生物炭作为土壤调节剂的潜力,促进土壤碳固醇,改善土壤质量并最终提高粮食安全。

分布式人工智能(一):协作解决问题
(7) Smith, R. G. 和 Davis, R.: 分布式问题解决中的合作框架,IEEE Trans.系统、人与控制论,第11,第1,页61 70 (1981)。(8) Lesser, V. R. 和 Erman, L. D.: 分布式解释:模型与实验,JEF.,'E Trans.on Computers,第 29 卷,第 12 期,第 1144-116 页 (1980) (9) Lesser, V. R. 和 Corkill, D. D.:分布式车辆监控测试平台:研究分布式问题解决网络的工具,AI 杂志,第15-33 页 (1983)。(10) Davis, R. 和 Smith, R. G.:谈判作为分布式问题解决的隐喻,A rtzf Intel!.,第 29 卷,第 12 期,第 1144-116 页 (1980)。20,No.1,页。63 109 (1983) (11) Smith, R. G.: 契约网协议:分布式问题求解器中的高级通信和控制,IEEE Trans.on Computers,Vol.29,No.12,页 1104-1113 (1980)
人类和计算机解决问题
这些启发式方法和其他方法由逻辑理论机器使用。它在逻辑“类似”中搜索与要证明的表达式相似的定理(例如,其中的变量数量大约相同);它从最终结果向后起作用;它尝试一种推理方法,如果不起作用,则尝试切换到另一种方法。它记得它所证明的定理,以便它可以在以后的定理中使用这些定理;它记得在处理特定类型的定理方面成功的方法,并应用了这些知识。并通过使用这些设备,逻辑理论机器设法将其任务减少为合理的比例;实际上,它成功证明了许多定理。而且它写的证据非常类似于A. N. Whitehead和Bertrand Russell获得的证据,五十年前,他们写了Mathematica Princiaia Mathematica,这是现代符号逻辑的基础。


解决问题的策略单元1
模块1:解决问题的策略单元1:解决问题的路线图:典型策略………………………………………………………………………………………………4单元2:解决问题的过程………………………………。13单元3:解决问题的计算方法………………………………………………………………………………25模块2:算法在解决问题单元中的作用1:抽象作为解决问题的工具………………………………。34单元2:算法…………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………………56 UNIT 4: PSEUDOCODE………………………………………………….. 69 MODULE 3: IMPLEMENTATION STRATEGIES UNIT 1: RECURSION……………………………………………….…… 78 UNIT 2: CONTROL STRUCTURES: SELECTION AND ITERATION 90 UNIT 3: DECOMPOSITION AND MODULARISATION…………..….. 105 UNIT 4: TESTING AND调试……………………………………。114
人工智能——通过搜索解决问题
• 人工智能中的许多问题都采用状态空间搜索的形式。• 状态可能是游戏中合法的棋盘配置、某种路线图中的城镇、数学命题集合等。• 状态空间是可能状态的配置以及它们如何相互连接,例如状态之间的合法移动。• 当我们没有一个算法可以明确告诉我们如何协商状态空间时,我们需要搜索状态空间以找到从起始状态到目标状态的最佳路径。• 我们只能通过考虑当前状态的可能动作并尽可能地向前看来决定做什么(或去哪里)。例如,国际象棋是一个非常困难的状态空间搜索问题。